【Advanced】MATLAB Control Systems Toolbox: Control Systems Toolbox User Guide
发布时间: 2024-09-13 16:18:01 阅读量: 35 订阅数: 43 

基于遗传算法的动态优化物流配送中心选址问题研究(Matlab源码+详细注释),遗传算法与免疫算法在物流配送中心选址问题的应用详解(源码+详细注释,Matlab编写,含动态优化与迭代,结果图展示),遗传
# 1. Introduction to MATLAB Control Systems Toolbox
The MATLAB Control Systems Toolbox is a powerful toolkit designed for the design, analysis, and simulation of control systems. It offers a comprehensive suite of functions and tools for modeling, analyzing, and controlling various control systems. This toolbox is widely utilized in academic research, industrial applications, and educational fields.
Key features of the Control Systems Toolbox include:
***System Modeling:** Supports various system modeling techniques such as state-space, transfer function, and zero-pole models.
***Control System Design:** Provides a range of control design techniques including PID, state feedback, and optimal control.
***System Simulation and Analysis:** Offers time-domain and frequency-domain simulation, along with stability, robustness, and performance analysis.
***Controller Implementation:** Allows direct deployment of designed controllers to hardware or software platforms.
***Integration with Other Tools:** Seamlessly integrates with Simulink, C++, and Python, among others.
# 2. Basic Theory of Control Systems Toolbox
### 2.1 System Modeling and Analysis
#### 2.1.1 State-Space Model
The state-space model describes the dynamic behavior of a system, consisting of state equations and output equations:
```
ẋ = Ax + Bu
y = Cx + Du
```
Where:
* `x` is the state vector
* `u` is the input vector
* `y` is the output vector
* `A`, `B`, `C`, `D` are the system matrices
**Parameter Explanation:**
* `A`: State transition matrix, describing the interaction between states
* `B`: Input matrix, describing the effect of inputs on states
* `C`: Output matrix, describing the effect of states on outputs
* `D`: Direct transmission matrix, describing the direct effect of inputs on outputs
**Code Logic:**
State-space models can be created using the `ss` function:
```
A = [1 2; 3 4];
B = [5; 6];
C = [7 8];
D = [9];
sys = ss(A, B, C, D);
```
#### 2.1.2 Transfer Function Model
The transfer function model describes the relationship between the input and output of a system, which is a quotient of complex polynomials:
```
G(s) = Y(s) / U(s) = N(s) / D(s)
```
Where:
* `G(s)` is the transfer function
* `Y(s)` is the Laplace transform of the output
* `U(s)` is the Laplace transform of the input
* `N(s)` and `D(s)` are polynomials
**Parameter Explanation:**
* `N(s)`: Numerator polynomial, describing the response of the output to the input
* `D(s)`: Denominator polynomial, describing the poles of the system
**Code Logic:**
Transfer function models can be created using the `tf` function:
```
num = [1 2];
den = [1 3 2];
sys = tf(num, den);
```
#### 2.1.3 Zero-Pole Model
The zero-pole model describes the zeros and poles of a system, where zeros are the roots of the numerator polynomial of the transfer function, and poles are the roots of the denominator polynomial:
```
G(s) = K * (s - z1) / (s - p1) * (s - p2) * ...
```
Where:
* `G(s)` is the transfer function
* `K` is the gain
* `z1`, `p1`, `p2` are zeros and poles
**Parameter Explanation:**
* `K`: Gain of the system
* `z1`: Zero, describing the system's quick response
* `p1`, `p2`: Poles, describing the system's stability
**Code Logic:**
Zero-pole models can be created using the `zpk` function:
```
zeros = [0.5];
poles = [1 2];
gain = 1;
sys = zpk(zeros, poles, gain);
```
# 3. Practical Applications of Control Systems Toolbox
### 3.1 System Simulation and Analysis
#### 3.1.1 Time-Domain Simulation
Time-domain simulation involves solving the differential equations of a control system to predict its response over time. Within the Control Systems Toolbox, time-domain simulations can be performed using the `sim` function. The syntax for the `sim` function is as follows:
```
[t,x,u] = sim(sys,t,u0,x0)
```
Where:
* `sys`: Control system model
* `t`: Simulation time span
* `u0`: Initial input
* `x0`: Initial state
**Code Example:**
```
% Define the system model
sys = tf([1],[1 2 1]);
% Set simulation time span
t = 0:0.1:10;
% Set initial input and state
u0 = 1;
x0 = [0; 0];
% Perform time-domain simulation
[t,x,u] = sim(sys,t,u0,x0);
% Plot output response
plot(t,x);
xlabel('Time (s)');
ylabel('Output');
title('Time Domain Simulation');
```
**Logical Analysis:**
* Line 1: Define a transfer function model.
* Lines 4-6: Set simulation time span, initial input, and initial state.
* Line 8: Use the `sim` function for time-domain simulation.
* Lines 10-13: Plot

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【ILWIS3.8空间分析功能全解析】:深度解读与应用案例

# 摘要
本文全面介绍ILWIS 3.8在空间分析领域的应用和功能。首先概述了ILWIS 3.8的空间分析框架及其基础功能和数据管理能力,包括对空间数据格式的支持、图层的创建与编辑,以及空间数据库的管理。接着深入探讨了ILWIS 3.8的核心空间分析功能,如缓冲区分析、网络分析与路径规划、地统计分析与地形模型,以及土地覆盖分类与变化检测技术。随后,文章通过应用实践章节展示了ILWIS 3.8
【Nextcloud深度剖析】:Windows服务器上的安装、优化与故障处理案例
# 摘要
Nextcloud作为一个开源的云存储解决方案,为用户提供了在私有服务器上存储和分享文件的平台。本文首先介绍了Nextcloud的基本概念及安装流程,然后详细探讨了其配置与管理,包括配置文件结构、用户权限设置以及应用扩展和集成。接着,本文着重分析了Nextcloud的性能优化方法,包括性能监控、调优、高可用性部署以及缓存与存储优化。在安全加固与故障排查章节,文章讨论了
【Python编程提升指南】:掌握AssimpCy,高效处理3D模型的10大技巧

# 摘要
本文主要探讨了Python编程在3D模型处理中的应用,特别是通过AssimpCy库实现的高效加载、变换和渲染。文章首先介绍了3D图形编程的基本概念及其在Python中的应用,随后详细阐述了AssimpCy库的安装、配置和核心数据结构解析。在此基础
【测量平差程序的优化】:性能提升与资源管理的高效策略
# 摘要
本文概述了测量平差程序优化的重要性,并深入探讨了相关理论基础与算法优化。首先,分析了平差问题的数学模型和最小二乘法的应用,然后对算法效率进行了理论分析,着重于计算复杂度和精度与效率之间的权衡。高效算法设计包括矩阵运算优化和迭代与直接算法的选择。在性能优化实践方面,探讨了代码级优化策略、多线程与并行计算的应用以及性能测试与评估。资源管理与优化章节则涵盖了内存管理、数
【Hybrid TKLBIST问题速解】:5大常见难题,一步到位的解决方案

# 摘要
Hybrid TKLBIST是一种结合了传统测试技术与现代测试方法的综合测试框架,它的基本概念、理论基础、常见难题以及实践应用是本文的研究重点。本文首先介绍了Hybrid TKLBIST的定义、原理及核心测试方法论,
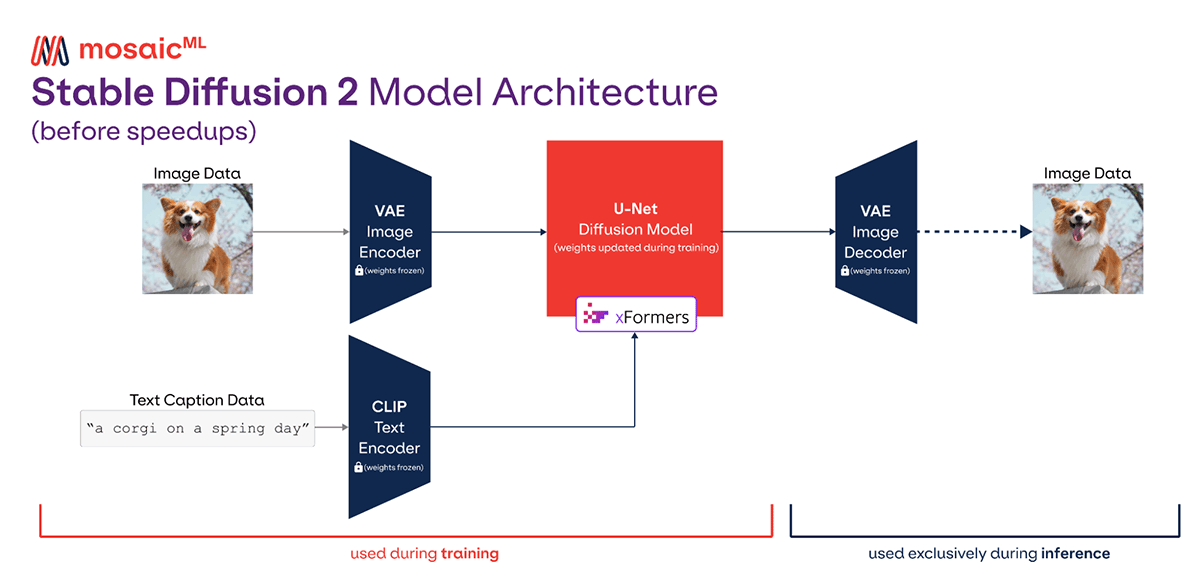
【Stable Diffusion参数调优宝典】:专家级别的调整与优化
# 摘要
Stable Diffusion模型作为一种深度学习生成模型,广泛应用于图像和文本生成等领域。本文旨在全面概述Stable Diffusion模型的基本概念、参数体系及调优技术。文章首先介绍了Stable Diffusion的结构与调优基础,然后深入探讨了其参数体系,包括参数的定义、类型和调优过程中的理论基础,如梯
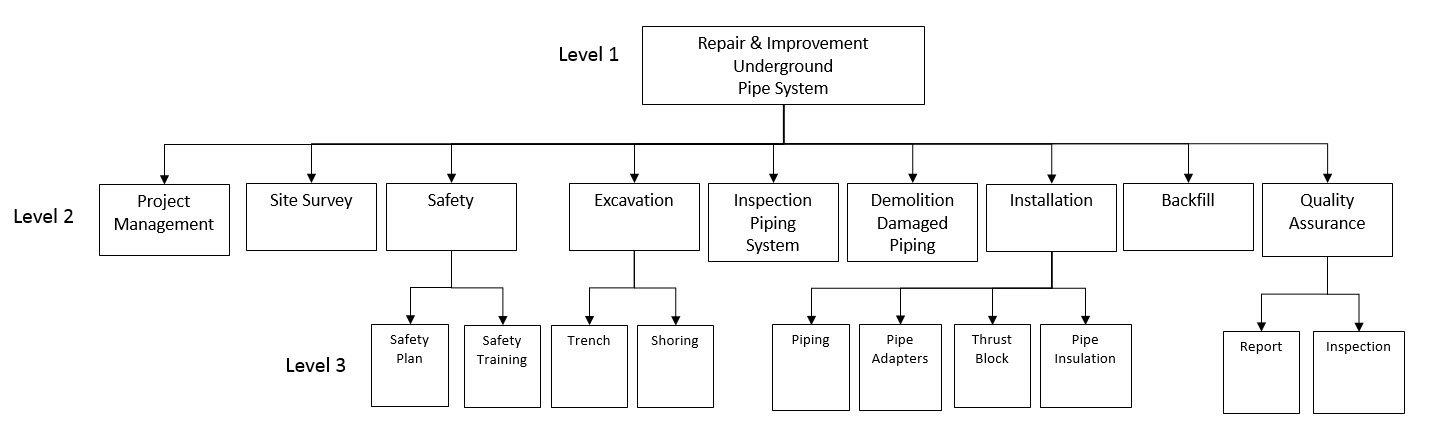
项目时间管理新策略:华为无线搬迁案例中的WBS应用详解
# 摘要
本文通过项目时间管理的理论基础探讨,详细阐述了WBS(工作分解结构)的概念、重要性、创建原则以及技巧,并将这些理论应用于华为无线搬迁案例中。通过对项目背景与目标的介绍,分析了搬迁项目的复杂性,并具体说明了如何设计WBS结构,结合时间计划,并进行跟踪和控制。文中还分析了项目时间管理的改进成果和WBS应用的深入分析。最后,针对WBS策略的优化与未来发展趋势进行了
【C#实践指南】:如何高效处理DXF文件数据
# 摘要
C#作为一门流行的应用程序开发语言,在处理DXF(Drawing Exchange Format)文件数据方面展现出了强大的功能。本文旨在介绍和分析C#在DXF文件数据处理中的各种技术和方法。通过深入探讨DXF文件格式、分析现有处理库和工具,并提供具体的编程实践,文章展示了从读取、编辑到高级应用的完整处理流程。本文还包含了案例研究,分析了真实世界中的需求、实现策略以及问题解决,旨在为开发者提供宝贵的经验和见解。文章的最后展望了未来技术趋势,
【信号完整性保障】:多输入时序电路信号完整性维护技巧

# 摘要
信号完整性是高性能电子系统设计中的关键因素,直接影响到电路的稳定性和性能。本文首先介绍了信号完整性的重要性和基本概念,然后深入探讨了信号完整性的理论基础,包括信号传输线效应、串扰以及电源噪声等问题。接着,本文分析了多输入时序电路面临的信号完整性挑战,并提出了相应的布线策略。第四章讨论了信号完整性维护的技术实践,涉及测试与仿真方法以及问题调试。文章进一步阐述了信号完整
【程控交换软件故障快速诊断】:用户摘挂机识别异常的检测与即时修复指南

# 摘要
程控交换软件故障的快速诊断对于确保通信系统稳定运行至关重要。本文概述了程控交换软件故障快速诊断的方法与实践应用,详细探讨了用户摘挂机识别异常的理论基础、检测技术、即时修复方法,并分析了这些异常对通话质量与系统性能的影响。文章进一步阐述了检测工具与流程的实现、常见异常的检测实例以及软件和硬件层面的修复策略。在实践应用方面,提供了现场与远程故
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )