边缘检测技术:Python实现与数学原理
85 浏览量
更新于2024-08-28
收藏 1.02MB PDF 举报
"这篇教程介绍了如何使用Python进行边缘检测,并探讨了边缘检测在图像处理中的重要性和作用。边缘检测能够简化图像,减少存储空间,同时保留图像的主要形状信息。文章进一步解释了边缘检测的数学原理,通过一个简单的例子展示了如何通过3x3的滤波器判断图像边缘。"
在图像处理领域,边缘检测是一项关键技术,它能够帮助我们提取图像中的轮廓信息,降低数据复杂度,同时保持图像的主要特征。如标题所示,本文聚焦于如何使用Python进行边缘检测。描述中提到,边缘检测不仅可以使图像“瘦身”,降低存储需求,而且在只关注图像整体形状而不关心细节的情况下特别有用。
边缘检测的数学原理主要涉及滤波器的应用。在讨论中,文章提供了一个简单的黑白图像示例,其中包含一个黑色正方形。滤波器通常是一个小的矩阵,例如3x3的矩阵,用于对图像的一小部分区域进行操作。在这个例子中,滤波器的元素与图像像素相乘后求和,如果结果达到某个阈值,就可能表明该像素位于边缘上。例如,当应用一个特定的滤波器时,如果计算结果为负的最大值,这可能意味着找到了图像中边缘的一个点,因为边缘通常代表像素值的突然变化。
在实际应用中,Python提供了多种库,如OpenCV和PIL,可以方便地实现边缘检测算法,如Canny、Sobel或Prewitt等。这些算法通过不同的数学方法检测图像中的边缘,包括梯度运算、二阶微分等,以识别亮度变化显著的像素区域。
Canny算法是一种常用的边缘检测方法,它结合了高斯滤波器来平滑图像,减少噪声影响,然后计算梯度强度和方向,最后通过非极大值抑制和双阈值检测来确定边缘。Sobel和Prewitt算子则是通过计算水平和垂直方向的图像导数来估计边缘。
在Python中,使用OpenCV库可以很容易地实现这些算法。例如,对于Canny算法,可以调用`cv2.Canny()`函数,传入图像和两个阈值参数。其他算法也有相应的函数可供调用。
边缘检测是图像处理中的基础步骤,它可以帮助我们提取关键信息,为后续的分析和识别任务提供简洁的输入。通过Python的图像处理库,开发者可以轻松地实现各种边缘检测算法,以满足不同的应用场景。
使用使用Python进行边缘检测进行边缘检测
为何检测边缘?
我们首先应该了解的问题是:“为什么要费尽心思去做边缘检测?”除了它的效果很酷外,为什么边缘检测还是一种实用的技
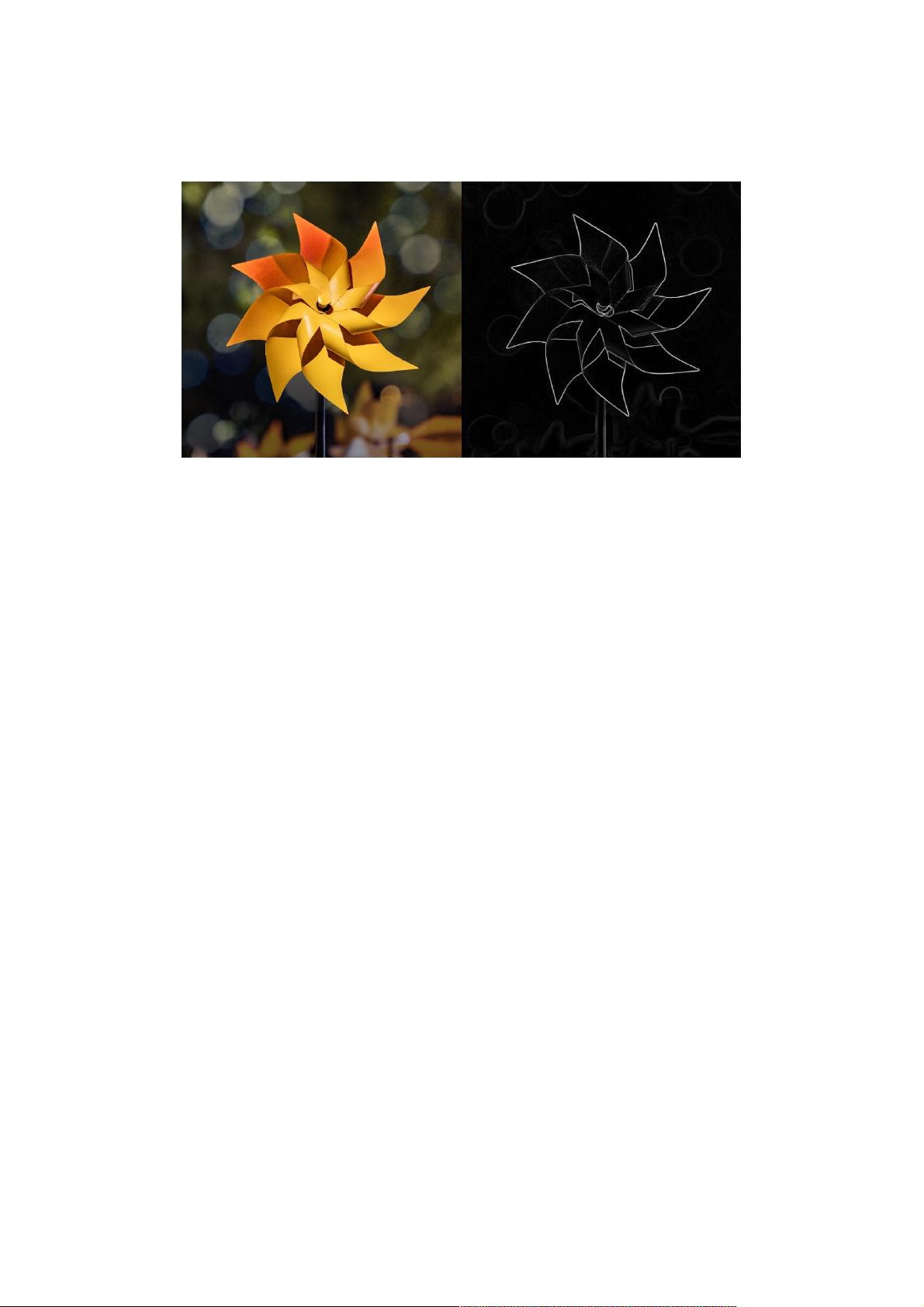
术?为了更好地解答这个问题,请仔细思考并对比下面的风车图片和它的“仅含边缘的图”:
可以看到,左边的原始图像有着各种各样的色彩、阴影,而右边的“仅含边缘的图”是黑白的。如果有人问,哪一张图片需要更
多的存储空间,你肯定会告诉他原始图像会占用更多空间。这就是边缘检测的意义:通过对图片进行边缘检测,丢弃大多数的
细节,从而得到“更轻量化”的图片。
因此,在无须保存图像的所有复杂细节,而 “只关心图像的整体形状” 的情况下,边缘检测会非常有用。
如何进行边缘检测 —— 数学
在讨论代码实现前,让我们先快速浏览一下边缘检测背后的数学原理。作为人类,我们非常擅长识别图像中的“边”,那如何让
计算机做到同样的事呢?
首先,假设有一张很简单的图片,在白色背景上有一个黑色的正方形:
下载后可阅读完整内容,剩余3页未读,立即下载
2021-01-27 上传
2023-05-12 上传
2023-07-30 上传
2024-04-04 上传
2024-03-29 上传
2023-04-25 上传
2023-05-01 上传

weixin_38735987
- 粉丝: 4
- 资源: 931
 我的内容管理
展开
我的内容管理
展开







最新资源
- 十种常见电感线圈电感量计算公式详解
- 军用车辆:CAN总线的集成与优势
- CAN总线在汽车智能换档系统中的作用与实现
- CAN总线数据超载问题及解决策略
- 汽车车身系统CAN总线设计与应用
- SAP企业需求深度剖析:财务会计与供应链的关键流程与改进策略
- CAN总线在发动机电控系统中的通信设计实践
- Spring与iBATIS整合:快速开发与比较分析
- CAN总线驱动的整车管理系统硬件设计详解
- CAN总线通讯智能节点设计与实现
- DSP实现电动汽车CAN总线通讯技术
- CAN协议网关设计:自动位速率检测与互连
- Xcode免证书调试iPad程序开发指南
- 分布式数据库查询优化算法探讨
- Win7安装VC++6.0完全指南:解决兼容性与Office冲突
- MFC实现学生信息管理系统:登录与数据库操作
