相机成像模型与标定技术详解
需积分: 0 13 浏览量
更新于2024-08-05
收藏 397KB PDF 举报
"相机成像模型及相机标定原理整理"
本文主要探讨了相机成像模型和相机标定的基本概念,特别关注了坐标系的转换、单目相机成像模型以及相机内参和外参的求解过程。相机标定是计算机视觉和SLAM(Simultaneous Localization And Mapping,同时定位与建图)领域的重要环节,它能够确定相机的内在特性,建立图像像素坐标与真实世界坐标之间的关系。
首先,文章提到了在视觉SLAM中常用的三个坐标系:世界坐标系、相机坐标系和图像坐标系。世界坐标系是全局参考框架,而相机坐标系以摄像机光心为原点,图像坐标系则以图像左上角为原点,基于像素计数。坐标系之间的转换依赖于相机的内参和外参,内参涉及相机内部光学系统的特性,如焦距;外参则涉及相机相对于世界坐标系的位置和方向。
接着,文章介绍了单目相机的针孔成像模型,这是描述三维空间点如何在二维图像上投影的基本模型。在该模型中,空间点通过焦距与成像平面相交形成投影,这个过程可以用线性代数的矩阵表示,即投影矩阵乘以空间点的齐次坐标得到图像坐标。
相机标定的过程通常采用张氏标定法,该方法包括以下步骤:首先,根据对应点的坐标求取单应性矩阵;然后,利用内参约束条件求解内参矩阵;接下来,通过极大似然估计来减小误差;最后,考虑相机的畸变模型,将畸变参数纳入似然函数中进行完整的极大似然估计,从而得到准确的标定参数。
相机的内参矩阵包含了焦距、主点偏移等信息,它定义了从相机坐标系到成像平面的映射。外参矩阵描述了相机在世界坐标系中的位置和姿态,通常由旋转矩阵和平移向量组成。这些参数对于准确地将图像像素坐标转换为3D空间坐标至关重要,对机器人导航、物体识别和场景重建等领域有重大影响。
总结来说,这篇资源涵盖了相机成像的基本原理,包括坐标系的定义、针孔相机模型的数学描述以及相机标定的步骤和目的。理解这些概念是进行高级计算机视觉应用的基础,例如视觉SLAM系统中的定位和建图。
相机成像模型及相机标定原理整理
要明确一点的位置,首先要明确所用的坐标系。在视觉 SLAM 中常用的坐标系有世界坐标
系、相机坐标系,图像坐标系等。点在不同坐标系下的坐标都以齐次坐标的形式出现,相互
间通过相机的内、外参进行转换。相机标定的目的就是确定相机的内参矩阵,得到特征点的
平面像素坐标与 3D 相机坐标的转换关系,进而解算载体位姿、构建场景地图。标定时最常
用的方法为张氏标定法,主要步骤为根据对应点坐标求取单应性矩阵、根据约束求取内参矩
阵,极大似然估计减小误差,再根据畸变模型,将畸变参数加入到似然函数中进行完整极大
似然估计,得到标定参数。
一、 针孔成像模型及坐标变换
1.1 常用坐标系
世界系为场景中固定的坐标系,为全局坐标系(依场景实际情况选定),以真实世界中的长
度为单位。点在世界坐标系下的齐次坐标为
。
相机坐标系以摄像机光心为原点
,光心所在与光轴垂直平面为
平面,沿光心水平向
右为轴,垂直向下为轴,沿光轴向前为轴,以真实世界中的长度为单位。点在相机坐标
系下的齐次坐标为
。
为方便参数推导,建立成像平面坐标系,以成像平面与光轴的交点为原点,水平向右为轴,
垂直向下为轴,以真实世界的长度为单位。点在该坐标系下的齐次坐标为
。
图像坐标系以图像左上角为原点,水平向右为轴,垂直向下为轴,以像素个数为单位。点
在图像坐标系下的齐次坐标为
。
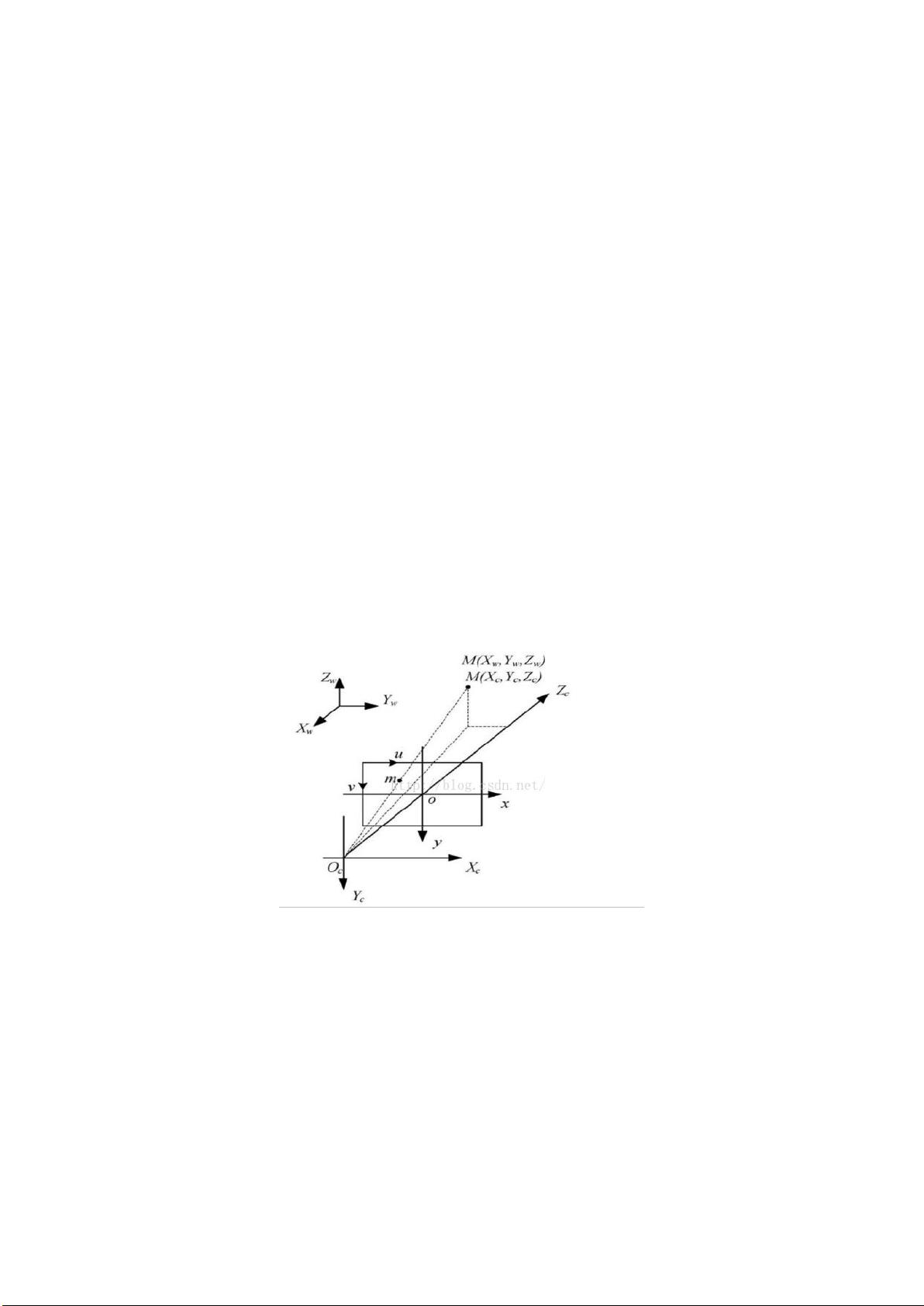
此三者关系如图 1 所示。
图 1 几个坐标系间的关系
1.2 单目相机成像模型
单目相机下,以针孔成像模型将相机坐标系下的点投影到成像平面,并转换到图像坐标。如
图 2,三维现实世界中的物体通过一个针孔投影在成像平面上。
成像平面与光心的距离即为摄像机的焦距,空间一点
与成像平面的投
影
满足相似关系,如图 2。
下载后可阅读完整内容,剩余7页未读,立即下载
893 浏览量
点击了解资源详情
306 浏览量
500 浏览量
893 浏览量
956 浏览量
848 浏览量
180 浏览量
439 浏览量

王向庄
- 粉丝: 25
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入理解FPGA:原理、设计与应用详解
- 淘宝网数据库专家陈吉平分享Oracle 9i RMAN全面指南
- MapInfo Professional用户指南精简版:全面教程
- 集成运放构建低通滤波器:设计与调试详解
- C语言MS12864R串口编程教程与实时显示数字示例
- 全面解析:SQL语句教程与实践
- Java记事本课程设计:实战提升编程技能
- TestLink使用手册:web测试管理系统的指南
- WML在线学习手册:Wireless Markup Language入门指南
- LoadRunner日志设置与函数使用详解
- C/C++编程指南:高效实践与命名规则详解
- Sybase函数详析:提升SQL技能的必备指南
- 电脑故障预防与日常维护指南
- LabVIEW7.0中文评估版教程:全面指南
- Adobe PostScript第三版权威指南
- 构建高性能集群计算机:OSCAR安装教程
