嵌入式Linux系统构建指南
需积分: 7 144 浏览量
更新于2024-07-25
收藏 961KB PDF 举报
"该资源主要涉及Linux在嵌入式系统中的应用,适合嵌入式系统设计者和一般Linux程序员阅读。内容详细解释如何将小型Linux发行版与特定硬件结合,创建从网络路由器到自制MP3播放器等各种设备。书中包含构建最小Linux系统的具体建议、选择合适硬件的指导,并教你如何构建第一个嵌入式Linux设备。此外,还介绍了如何寻找适合你应用的开源软件,以及调试工具的选择,避免陷阱,降低构建成本。"
在《Embedded Linux》这本书中,作者深入探讨了嵌入式Linux的世界,这是一个专为嵌入式系统和信息家电设计者,以及通用Linux程序员准备的指南。嵌入式Linux的核心是将小巧的Linux操作系统与各种硬件平台相结合,实现从网络设备到消费电子产品的广泛应用。书中的内容不仅涵盖了如何定制和优化Linux系统以适应不同的硬件需求,还讨论了如何在资源有限的嵌入式环境中实现高效运行。
首先,书中强调了如何构建最小化的Linux系统,这是嵌入式设计的关键,因为嵌入式设备通常对存储空间和计算能力有严格的限制。作者提供了具体的策略和技巧,帮助读者减小系统的体积,以适应最小化的需求。
其次,选择正确的硬件是成功构建嵌入式Linux系统的另一个重要因素。书中提到了如何评估和选择适合目标应用的硬件平台,包括考虑性能、成本和功耗等因素,以达到“更好、更快、更便宜”的目标。
此外,书中还介绍了如何利用开源软件来增强嵌入式设备的功能。开源社区提供了大量的软件资源,如操作系统内核、驱动程序、应用程序框架等,这些都是构建嵌入式系统的重要组成部分。作者教导读者如何找到并集成这些软件,以满足特定的应用需求。
在实际开发过程中,调试是不可或缺的一环。书中提供了关于调试工具选择的建议,帮助开发者有效地追踪和解决代码中的问题,从而提高开发效率和产品质量。
最后,降低成本是商业成功的关键。作者分享了避免常见错误和减少构建成本的方法,使读者能够在设计过程中做出明智的决策,确保项目的经济性和可行性。
通过这本书,读者不仅能学习到嵌入式Linux的基本概念和技术,还能获得实践经验,了解如何从头开始构建一个嵌入式Linux设备。无论是对于初学者还是经验丰富的开发者,这都是一份宝贵的参考资料,可以帮助他们在嵌入式领域取得更大的成就。例如,书中提到的TiVo产品就是一个成功的案例,它展示了Linux如何驱动创新的家用电子产品,如自动录制电视节目的设备。

Embedded Linux
Page 16
•
Typing
make config
,
make menuconfig
, or
make xconfig
in the root of the kernel source runs
the standard kernel configure routines. You can turn options on or off or sometimes compile
them as modules so they can be loaded at runtime.
•
There are hundreds—perhaps even thousands—of kernel patches floating around the Internet.
Some are very small—enough to fix a small bug in one file. Medium-size patches may affect a
half-dozen files and add support for a particular hardware device. Some large patches add or
affect many dozens of files and add support for new architectures. Often applying a patch adds
new questions or entire screens to the kernel-configuration screens previously described.
•
The One True Method of really "configuring" the kernel to do exactly what you want is to hack
on it yourself. Until recently, this was an exercise only for those who have lots of time and
patience—the Linux kernel source code is well structured but somewhat obtuse. Linus doesn't
believe in cluttering up the source with comments for the uninitiated (see Chapter 5 of
Documentation/Coding Style in the Linux source tree).
Fortunately, times have changed and there are now several good overviews of the Linux kernel. Perhaps
the most lucid is Understanding the Linux Kernel by Daniel Pierre Bovet and Marco Cesati (O'Reilly,
2000).
Networking, Filesystems, and Executable Formats
Some embedded Linux applications have no use for the networking code. Be sure to configure the
kernel so that the networking code is skipped if you don't need it; it takes up a lot of space. Also, make
sure that your kernel supports only the one or two filesystem types you actually need. Finally, you
probably need only one executable format, ELF (Executable and Linking Format), for your embedded
application, so be sure to turn off all the rest. For details on the ELF file format, consult the following
documents:
•
http://ibiblio.org/pub/Linux/GCC/ELF.doc.tar.gz
•
http://ibiblio.org/pub/Linux/GCC/elf.ps.gz
In general, it's a good idea to look through the documentation for all the choices in the kernel build
menu. If you're using
make menuconfig
to configure the kernel, you can press the question mark (
?
)
at any time to get information on the choice you have highlighted.
While you're developing your embedded device, it's handy to enable loadable module support in the
kernel. That way, if you need support for a feature that you hadn't anticipated, you can go back,
recompile the modules you need, copy them onto your device, and load them. Without loadable module
support, you have to recompile the whole kernel, which can be a bit of a pain. When you're done
developing the device, you can save some amount of RAM and ROM space by recompiling the kernel
without loadable module support and with your drivers compiled directly into the kernel. However, you
should figure out exactly how much of a savings this is and whether it's worth it—having loadable
module support may be useful for upgrading drivers in the field.
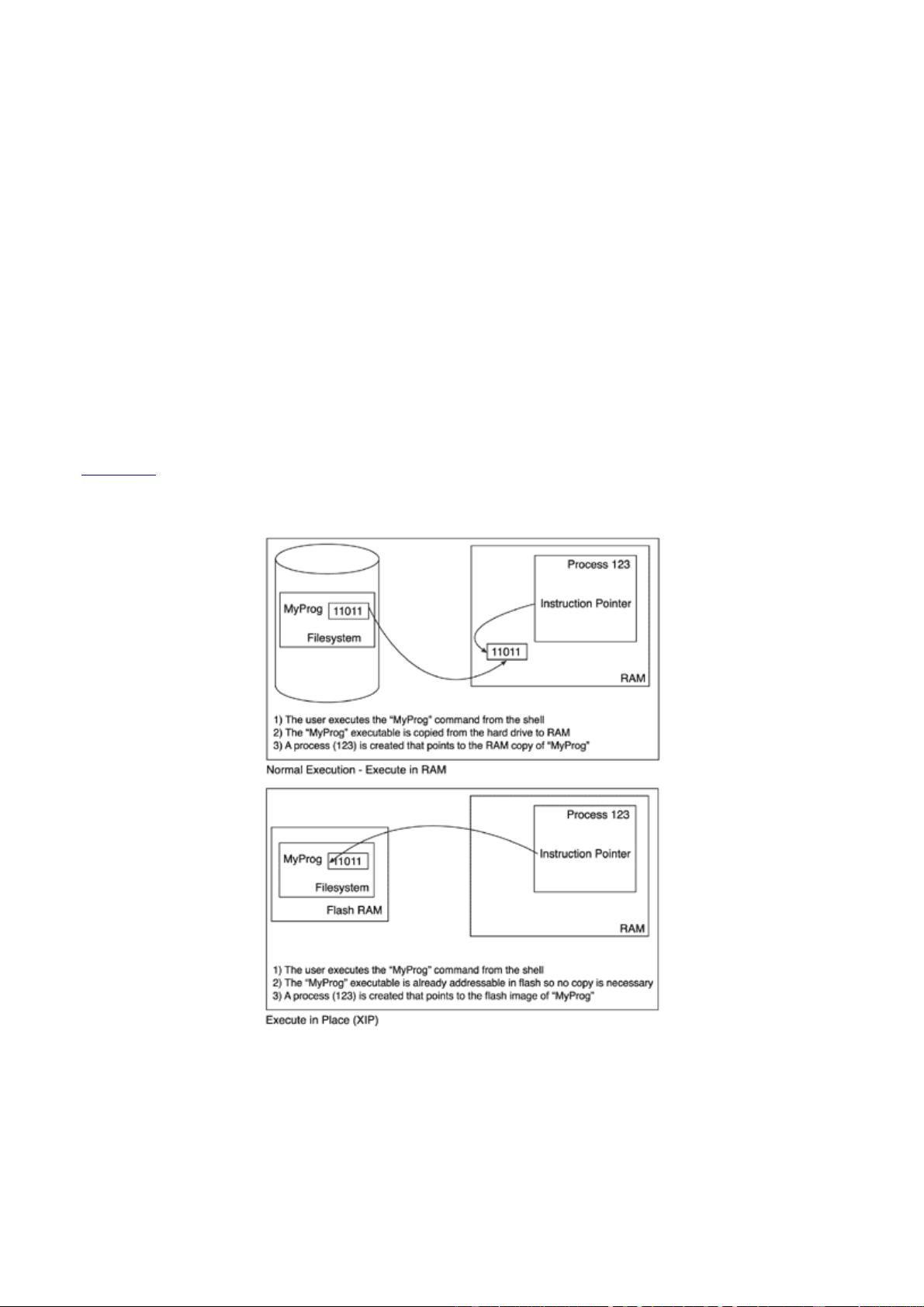
Execute-in-Place (XIP)



剩余163页未读,继续阅读
2024-11-29 上传
2024-11-29 上传
2024-11-29 上传
2024-11-29 上传
2024-11-29 上传
2024-11-29 上传
2024-11-29 上传
2024-11-29 上传
2024-11-29 上传

qichuanduan
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
