NURBS曲线在简单多边形内弱可见性算法与应用
128 浏览量
更新于2024-07-14
收藏 735KB PDF 举报
本文主要探讨了"简单多边形内NURBS曲线的弱可见性多边形"这一主题,发表在2014年的《计算与应用数学杂志》(Journal of Computational and Applied Mathematics)第256期。该研究论文关注的是在建筑设计、艺术馆巡逻和虚拟现实等应用场景中,计算非均匀有理B样条(NURBS)曲线在简单多边形内部的弱可见性区域的重要性。NURBS曲线以其灵活性和精确性在图形学和工程设计中广泛应用,但确保其在复杂几何体中的可见性问题是一项挑战。
论文的核心内容首先介绍了NURBS曲线的基本概念,即非均匀有理B样条曲线,它是一种在计算机图形学中常用的光滑曲线表示方法,能够精确地描述复杂的形状。然后,作者提出了一种算法,针对多边形内部的NURBS曲线,通过将其划分为三角形曲线,来处理这个问题。在这个过程中,算法的关键在于计算所谓的"弱可见性多边形"(Weak Visibility Polygons, WVP),这是一种特殊的多边形,仅包含那些从多边形外部观察时,可以被NURBS曲线遮挡的区域。
算法设计旨在解决如何有效地确定NURBS曲线对简单多边形内部空间的影响,以便于理解和优化视觉呈现。这种方法对于渲染软件、游戏引擎以及建筑设计软件中的视图管理和光照计算至关重要,因为它能帮助减少计算负担,提高渲染效率,并确保图形的真实性和沉浸感。
论文接收日期为2012年6月22日,修订后于2013年7月6日提交,表明作者在深入研究和改进算法方面投入了大量精力。论文的关键词包括:弱可见性多边形、NURBS曲线、简单多边形,这些关键词体现了文章的主要研究焦点。
总结来说,这篇文章提供了实用的几何计算方法,对于理解和控制NURBS曲线在三维空间中的视觉表现具有显著价值,对于那些依赖于复杂几何体交互和实时渲染的现代计算机图形学应用来说,是一项重要的理论贡献。
C.-L. Yang et al. / Journal of Computational and Applied Mathematics 256 (2014) 1–15 3
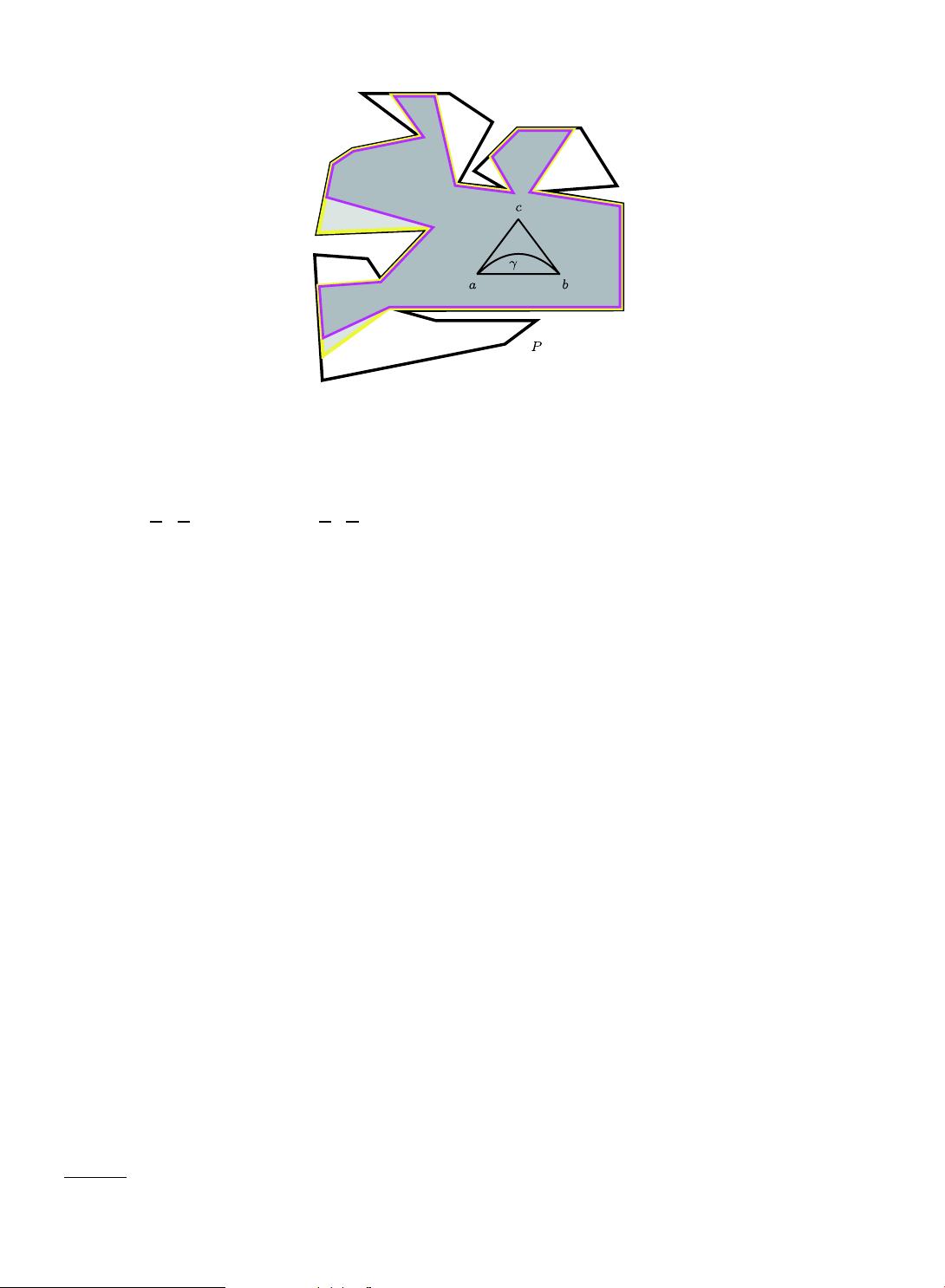
Fig. 2. Weak visibility polygons of a primitive triangular curve γ and its triangular hull ∆abc inside a simple polygon P. (For interpretation of the references
to colour in this figure legend, the reader is referred to the web version of this article.)
where D
k
are the control points, ω
k
are the weights and N
d
k
are the dth-degree B-spline basis functions defined on the knot
vector
T = {0, . . . , 0
d+1
, t
d+1
, . . . , t
n
d
−1
, 1, . . . , 1
d+1
}.
Definition 2 (Visibility Polygon). Two points p and q in a polygon P are visible to each other if the line segment pq contains
no points outside P. The visibility polygon VP(q) of a point q in P is the set of all points in P that are visible from q.
Definition 3 (Weak Visibility Polygon). For a curve or region γ and a point q in a polygon P, if there exists a point p in γ such
that p and q are visible, we say q is weakly visible from γ , and the set of points inside P that are weakly visible from γ is the
weak visibility polygon of γ , denoted by WVP(P, γ ).
Fig. 2 shows the WVPs of a curve segment γ and its triangular hull ∆abc (see Definition 4) inside a simple polygon P.
The polygon with yellow edges is the weak visibility polygon of ∆abc while the polygon with purple edges is the weak
visibility polygon of γ . In fact, the vertices of the yellow and purple polygons are on the boundary of P. To better illustrate
the difference, the polygons are offset in Figs. 2, 8–10 and 17.
In this paper, we focus on how to compute the weak visibility polygon of NURBS curves inside simple polygons. The WVPs
of any curve inside a triangle is a subset of the WVP of the triangle (see Fig. 2). Also the WVP of a triangle is the union of
the WVPs of its three edges. Since it is relatively easy to compute the WVPs of line segments, we first subdivide the NURBS
curve into triangular curves (see Definition 5), and compute the WVPs
P of their triangular hulls. Finally, the WVP of the
NURBS curve is obtained by refining
P. Here, the triangular hulls are used to obtain an intermediate result and serve as a
bridge between them.
Definition 4 (Triangular Hull). Let a and b be the two endpoints of a C
11
continuous NURBS curve γ , ac and bc be vectors
tangent to γ at the endpoints a and b, respectively, and c be the intersection point of ac and bc. If γ lies entirely inside ∆abc,
we say ∆abc the triangular hull of γ .
Definition 5 (Triangular Curve). A NURBS curve γ is called a triangular curve if it satisfies
(1) γ is C
1
continuous;
(2) γ is contained in the boundary of its convex hull;
(3) γ has a triangular hull.
In Fig. 3(a), the curve γ is C
1
continuous and divided into three sub-curves γ
1
, γ
2
and γ
3
by the points b and c. The
boundary of γ ’s convex hull is composed of ad (dotted line), γ
1
, bc (dotted line) and γ
3
. The curve γ in Fig. 3(a) is not a
triangular curve as it is only partly contained in the boundary of its convex hull while the curve γ in Fig. 3(b) is a triangular
curve as it is completely contained in the boundary of its convex hull.
1
A curve is called C
1
continuous if its first derivative is continuous at all points of the curve.
剩余14页未读,继续阅读
2007-12-26 上传
2012-05-25 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-11-09 上传
2024-11-09 上传
2024-11-09 上传

weixin_38723699
- 粉丝: 6
- 资源: 871
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
