深度感知全景分割统一框架:PanopticDepth
85 浏览量
更新于2024-06-20
收藏 1.99MB PDF 举报
"本文介绍了一种深度感知全景分割(DPS)的统一框架,旨在结合单目深度估计和全景分割,以从单幅图像中重建详细的3D场景理解。传统方法将这两个任务分开处理,而提出的PanopticDepth框架通过实例掩码和动态卷积技术将它们融合在一起,提高了深度精度和分割质量。该框架不直接预测所有像素的深度,而是为每个实例生成特定的卷积内核来预测深度和分割掩码。此外,引入实例级深度线索以增强深度学习的监督。实验证明了这种方法的有效性,并在Cityscapes-DPS和SemKITTI-DPS数据集上取得了良好的结果。"
深度感知全景分割(DPS)是计算机视觉领域中的一个重要研究方向,它要求模型不仅对图像进行语义分割,还要估计每个像素的深度信息。传统的解决方案是将深度估计和全景分割视为两个独立的任务,分别用不同的网络分支处理。然而,这种方法忽视了两者之间可能存在的协同作用。
本文提出的PanopticDepth框架打破了这种分割,通过引入实例掩码和动态卷积,将深度预测与全景分割任务相结合。实例掩码用于区分图像中的不同对象,而动态卷积则允许网络根据实例特性生成特定的卷积内核,以更准确地预测每个实例的深度和分割信息。这种设计使得网络能更好地利用实例级的语义线索,提高深度预测的准确性,同时优化深度图的质量。
在深度学习的监督机制中,作者还引入了实例级深度线索,通过新的深度损失函数来进一步提升深度估计的性能。这种方法的创新之处在于,它不再局限于全局或像素级别的深度预测,而是针对每个实例进行精细化处理,从而提供更为精确的3D场景重建能力。
实验结果显示,PanopticDepth在Cityscapes-DPS和SemKITTI-DPS数据集上的表现优于传统方法,证明了该框架的有效性和潜力。这个统一解决方案不仅有助于推动DPS领域的研究,也为实际应用如自动驾驶、机器人导航等提供了强大的技术支持。
深度感知全景分割的统一框架PanopticDepth通过实例掩码和动态卷积的结合,成功地解决了深度估计与全景分割的协同问题,提升了3D场景理解的准确性和效率。未来的研究可能会进一步探索如何优化这个框架,以适应更多复杂环境和应用场景。代码已开源,可从https://github.com/NaiyuGao/PanopticDepth获取,以便其他研究者和开发者进行复现和扩展。
1635
1
2
2
∈
∈
Σ
Σ
“
r
”
s
r
s
∈
∈
D
D
分类 0
n×1
掩模内核2
m
n×)
m
深度核2
d
n×)
d
特 征
金
字 塔 网
络
输入图像
单级功能
256×$
$
×W
$
高分辨率
特征
256× $
<
$4 ×
W
<
$4
K
D
深度图生
成器
嵌入深度(
d
)
d
× $
<
$4 × W
<
$4
K
M
实例深度贴图D
n×$/4×W/4
深度估计
&3ll
$×W
3×$×W
掩模嵌入(
m
)
m
× $
<
$4 × W
<
$4
实例掩码+ n×
$
<
$4 × W
<
$4
全景分割
4
$×W
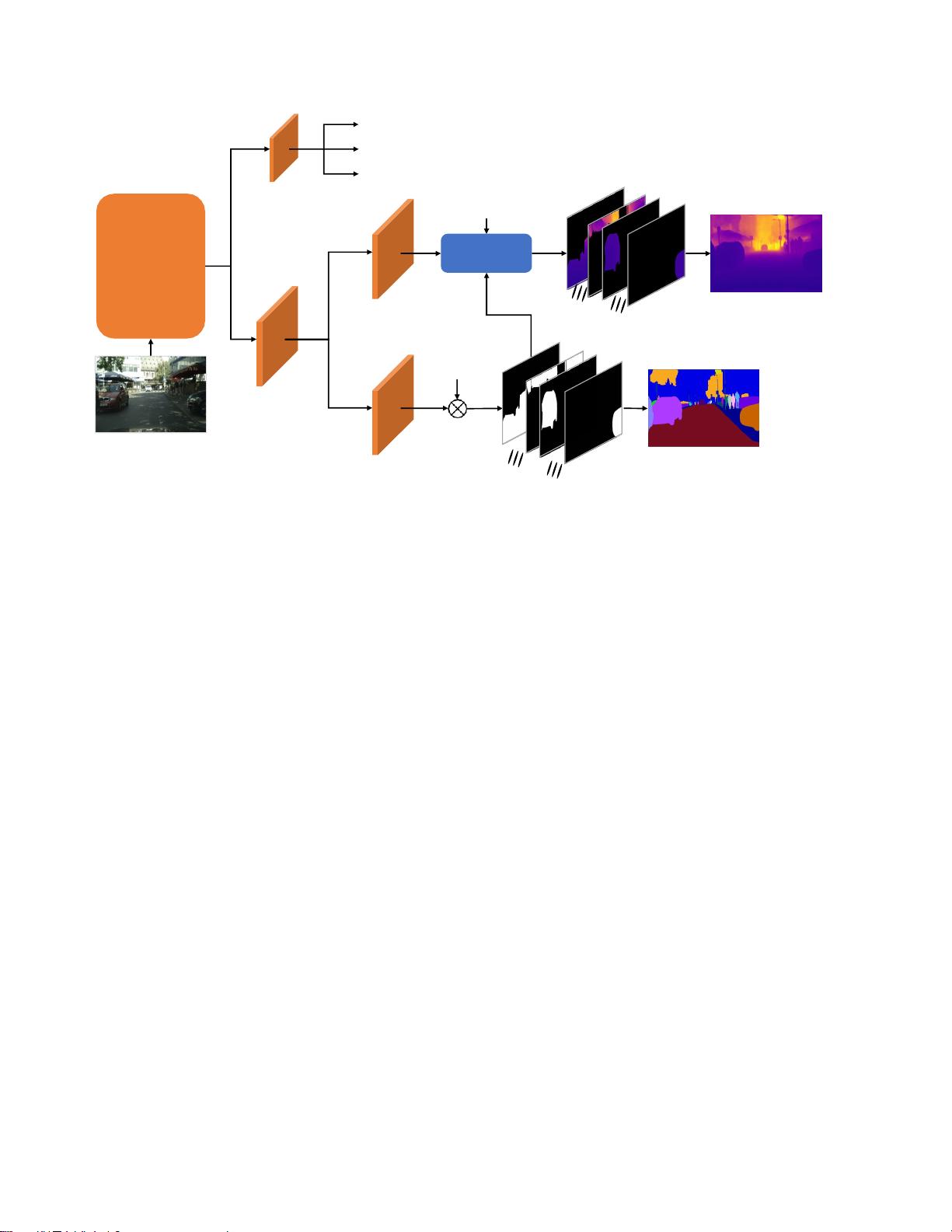
图2.我们提出的PanopticDepth的框架。H和W分别是输入图像的高度和宽度。N表示事物和东西实例的数量。c是类别数。e
m
、
e
d
和e
d
是掩码核的嵌入维度,深度
1 2
内核和深度嵌入图。表示卷积。
用argmax产生非重叠的全景分割结果,使得每个像素
被分配给一个物体或填充物片段,没有像素被标记为
此外,我们建议增加一个培训过程,
3.3.1
深度图生成器
给定特定于实例的深度核
K
d
R
N
×
e
1
和共享深度嵌入
E
d
R
e×H/
4
×
W/
4
(我们设置
e
d
=
e
d
),类似于实例掩码生成过程,
弥合培训和测试之间的性能差距。
1 2
′
具体地说,我们发现学习模型经常融合远距离的实
例,这是由于广泛采用的图像裁剪策略造成的一些以
前的作品[3,37]通过直接用原始分辨率图像训练模型
来解决这个问题,这是有效的,但会显着增加GPU内
存占用。相反,我们提出了一种更有效的训练策略,
即
,在全图像尺度上微调学习的更详细的培训过程见
第4.3小节。
3.3.
逐实例深度估计
我们通过在全景分割中使用的相同实例特定的内核
技术来预测每个实例的深度,该技术统一了深度估计
和全景分割的管道。如图2的中间部分所示,我们首先
在深度嵌入上运行深度核以生成实例深度图,然后根
据全景分割结果合并这些在本节中,我们首先介绍深
度图生成器,然后介绍一个新的深度损失。
我们首先通过卷积和Sigmoid激活生成归一化的实例深
度图D,然后通过等式4或等式5将其非归一化为深度图
D
D
′
=
Sigmoid
(
Kd
<
$
Ed
)
,
(
3
)
T1
(D|D
,
d
,
d
)
=
dmax
×(d × D
+
d
)
,
(
4
)
T2
(
D
|
D
′
,
d
r
,
d
s
)
=
d
max
×
d
r
×
(
D
′
−
0
.
5
)
+
d
s
,
(
5
)
其 中 d
max
控 制 深 度 比 例 , 并 设 置 为 88 , 与
Cityscapes-DPS和SemKITTI-DPS的深度范围一致。
我们规范化深度图的原因是,不同的实例具有广
泛的深度范围,使得难以学习有效的共享深度嵌
入。 为了简化深度估计的学习并受到批量
归一化
[15]
的启发,我们预测归一化深度图
D
'
,
这是通过使用两
个预测的实例级深度变量(深度
范围d
r
R
N
×
1
和深
度偏移d
s
R
N
×
1
)对实例深度图
D
进行归一化而获得的
。它们分别
描
述了每个实例的深度偏差和方差,并且可以
通过简单
地设置e
d
=
e
d
+
2从与深度内核并行的高级特征中
导出。注意
1 2
剩余16页未读,继续阅读
2023-05-17 上传
2023-10-10 上传
2023-06-11 上传
2023-07-27 上传
2023-05-31 上传
2023-10-15 上传
2023-05-31 上传
2023-09-12 上传
2023-02-26 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Hadoop生态系统与MapReduce详解
- MDS系列三相整流桥模块技术规格与特性
- MFC编程:指针与句柄获取全面解析
- LM06:多模4G高速数据模块,支持GSM至TD-LTE
- 使用Gradle与Nexus构建私有仓库
- JAVA编程规范指南:命名规则与文件样式
- EMC VNX5500 存储系统日常维护指南
- 大数据驱动的互联网用户体验深度管理策略
- 改进型Booth算法:32位浮点阵列乘法器的高速设计与算法比较
- H3CNE网络认证重点知识整理
- Linux环境下MongoDB的详细安装教程
- 压缩文法的等价变换与多余规则删除
- BRMS入门指南:JBOSS安装与基础操作详解
- Win7环境下Android开发环境配置全攻略
- SHT10 C语言程序与LCD1602显示实例及精度校准
- 反垃圾邮件技术:现状与前景
