3D点云分析新进展:卦限CNN克服几何信息损失
版权申诉
201 浏览量
更新于2024-06-27
收藏 1.26MB DOCX 举报
随着自动驾驶和机器人技术的快速发展,3D点云数据分析成为关键领域,因其在实时环境理解和决策支持中扮演着重要角色。基于深度学习的点云分析方法因其高效性和准确性而备受瞩目,主要分为两大类:无序点云规则化方法和直接基于点云的方法。
无序点云规则化方法首先将3D点云转化为规则的体素结构或多视图图像,以便利用传统的卷积神经网络(CNN)处理。然而,这种方法存在的问题是体素化过程可能导致几何信息的丢失,而多视图投影会压缩数据维度,降低了细节保留。尽管如此,这类方法仍可捕捉到局部特征,但效果受限于预处理过程。
直接基于点云的方法不依赖于规则结构,主要包括MLP、卷积和图模型。MLP方法,如PointNet,通过参数共享的多层感知器独立处理每个点,再通过对称函数聚合形成全局特征,解决了无序性问题,同时通过T-Net网络实现旋转不变性。然而,PointNet缺乏对局部特征的有效提取,因为它对每个点处理独立,缺乏局部上下文信息。
PointNet++为改进这一点引入了层次化结构,通过逐层采样、分组和PointNet操作,增强了对局部特征的学习能力。这种递归结构能够逐渐细化特征提取,提高点云的局部理解。基于卷积的方法,如PointConv[15-17],利用邻域点的权重参数学习来聚合特征,有效地考虑了点之间的空间关系,这在点云分析中已取得显著成果。
最后,基于图的方法,如Graph Neural Networks (GNNs)[18-20],将点云视为图结构,通过学习节点间边的权重来更新特征,这在处理复杂几何结构和全局关系时展现出优势。然而,图方法在计算效率上可能面临挑战,尤其是在大规模点云上。
总结来说,3D点云分析的发展围绕着如何平衡无序性处理、局部特征提取和计算效率。现代方法如PointNet++, PointConv以及GNNs都在不断优化这些方面,以提升3D点云的精确分析和理解能力,这对于自动驾驶、机器人技术以及三维重建等领域具有深远影响。
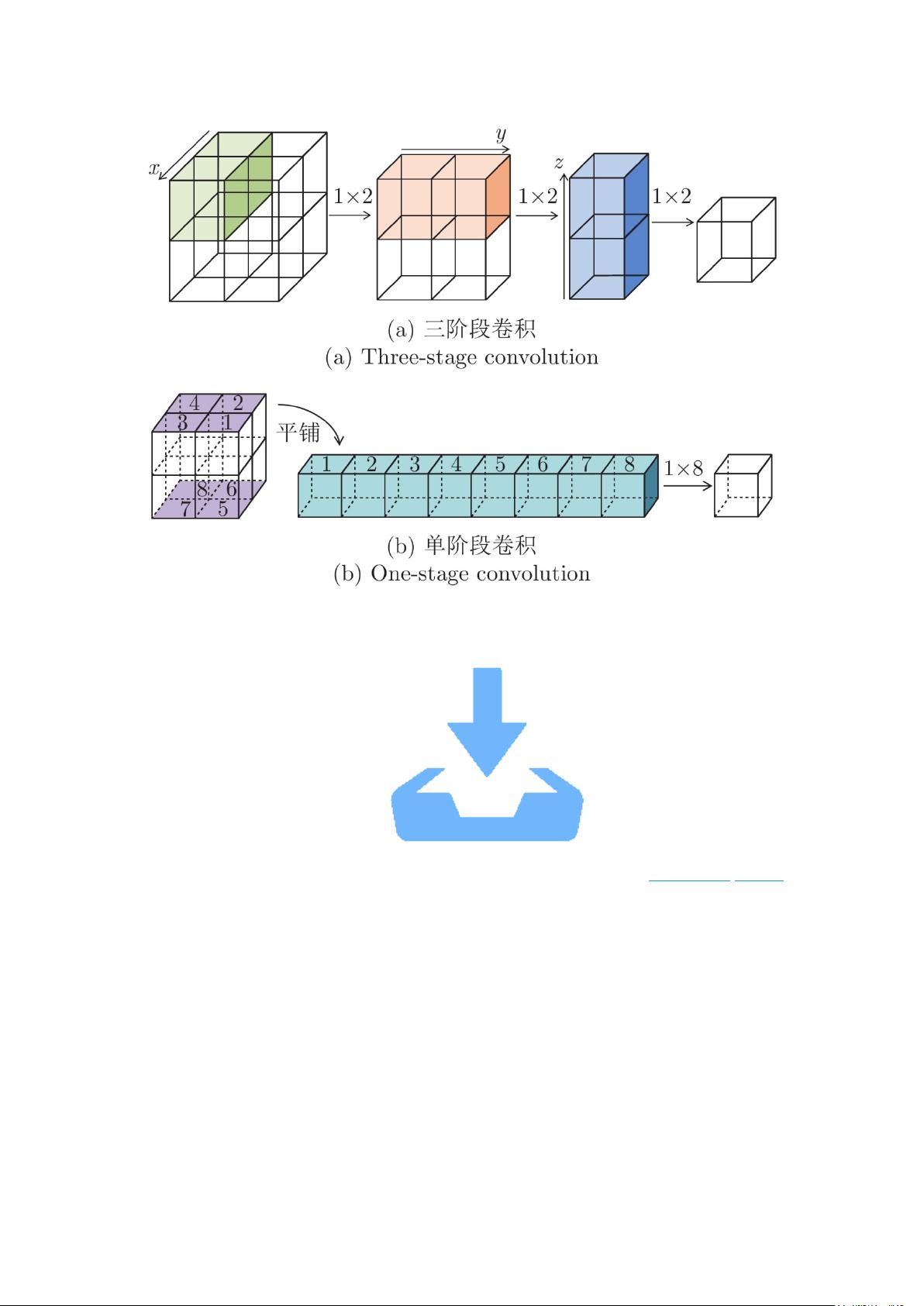
图 2 三阶段与单阶段 2D 卷积的对比
Fig. 2 Comparison of 2D CNN with three-stage and one-stage
下载: 全尺寸图片 幻灯片
f(l)(si)=∑j=18wij(concat(xi,xi−xij,fij))f(l)(si)=∑j=18wij(concat(xi,xi−xij,fij))
(1)
其中, f(l)(si)f(l)(si)表示点 sisi 在第 ll 层学到的特征, concatconcat 表示级联操作, wijwij
表示 sisi 和 sijsij 之间的可学习权重.
由于 Octant-CNN 先通过 T-Net 对点云方向进行预先标定, 其后采用一个二维卷积同等
处理各卦限内的点及其特征, 使得单阶段卷积对输入点云具有各向同性, 因此对于不同角度
的同一点云输入, Octant-CNN 总能得到相似的特征表示, 具有旋转不变性.
为了使每个点能够提取更丰富的特征, Octant-CNN 在卦限卷积模块中堆叠了多层卷积
操作, 并将各层的输出特征通过 MLP 进行融合, 以充分利用各层次特征信息, 并且 MLP 的
剩余16页未读,继续阅读
2021-02-07 上传
2024-10-26 上传
2024-10-26 上传
2024-10-26 上传
2022-02-13 上传
2021-07-08 上传
2022-11-13 上传

罗伯特之技术屋
- 粉丝: 4426
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
