MATLAB实现的自适应模糊神经控制系统详解
自适应模糊神经控制系统是一种结合了神经网络和模糊逻辑的先进控制策略,它利用神经网络的自学习能力与模糊系统的非精确性和灵活性相结合,实现对复杂系统的动态适应性控制。本文主要关注于这种系统的结构以及如何在MATLAB平台上实现。
首先,模糊神经网络控制因其无需依赖精确的物理模型,而是依赖于专家知识和经验,使其成为解决不确定性和复杂控制问题的理想选择。然而,传统模糊系统中,模糊规则的设定往往依赖于人类主观判断,对于系统特性不完全了解或极其复杂的情况,这种做法可能效率低下。自适应神经模糊系统则引入了数据驱动的建模方法,通过学习大量已知数据,自动调整模糊隶属度函数和规则,从而减少了人为因素的影响,提升了控制的准确性。
自适应神经模糊网络控制系统的核心结构包括神经模糊网络控制器(NFNC),输入信号R,以及误差处理单元,如误差E和误差变化量化后的模糊量EC。学习算法在这一过程中起着关键作用,它通过分析数据来动态调整系统参数,如量化因子Ke和Kc,以实时适应被控对象和环境的变化。这就使得系统能够在不断变化的环境中保持高效且精准的控制。
具体到MATLAB实现,作为一种广泛使用的数值计算软件,它提供了丰富的工具箱支持自适应模糊系统的开发。用户可以利用MATLAB的模糊逻辑库(Fuzzy Logic Toolbox)创建模糊系统,设计模糊规则,以及实现模糊推理过程。同时,结合神经网络工具箱(Neural Network Toolbox),可以构建自适应神经网络部分,通过反向传播等算法调整网络权重,形成自适应的模糊规则库。MATLAB的图形用户界面(GUI)也使得调试和可视化过程更加直观,提高了开发效率。
总结来说,自适应模糊神经控制系统结合了神经网络的自学习能力和模糊系统的鲁棒性,通过MATLAB的实现,可以有效解决实际工业控制问题中的不确定性,特别适用于那些模型复杂或特征未完全明确的系统。通过理论阐述和MATLAB实践,本文提供了一种实用且灵活的控制解决方案。
自适应模糊神经控制系统及其 MATLAB 实现
摘 要:本文介绍了自适应神经模糊网络控制系统的结构,并在此基础上重点介绍了自适应神经模糊系统
及其 MATLAB 实现。
关键词:自适应;神经模糊系统;MATLAB
Abstract: This text has introduced the structure of the fuzzy network control system of
adaptive nerve ,and has recommended especially fuzzy system and MATLAB of the adaptive nerve are
realized on this basis.
Key woeds: adaptive;neuro_fuzzy system;MATLAB
1 引言
模糊神经网络控制在控制领域里目前已经成为一个研究的热点,其原因在于神经网络和模糊系统两者
之间的互补关系。尽管模糊推理系统的设计(隶属度函数和模糊规则的建立)不主要依靠对象的模型,但是它
却相当依靠专家或操作人员的经验和知识。若缺乏这样的经验和知识,则很难期望它能获得满意的控制效果。
而神经网络的一大特点就是其自学习功能,将这种自学习的方法应用于对模型特征的分析与建模上,产生自适
应的神经网络技术。这种自适应的神经网络技术对于模糊系统的模型建立(模糊规则库的建立)是非常有效的
工具。而自适应神经模糊系统就是基于数据的建模方法,该系统中的模糊隶属度函数及模糊规则是通过大量的
已知数据的学习得到的,而不是基于经验和直觉任意给定的,这对于那些特性还不被人们所完全了解或者特性
非常复杂的系统尤为重要。
2 自适应神经模糊网络控制系统的结构
自适应神经模糊网络系统的定义是指具有学习算法的神经模糊网络系统,这里的神经模糊网络系统是
由服从模糊逻辑规则的一系列“如果—则”规则所构造的;而学习算法则依靠数据信息来对神经模糊系统的参
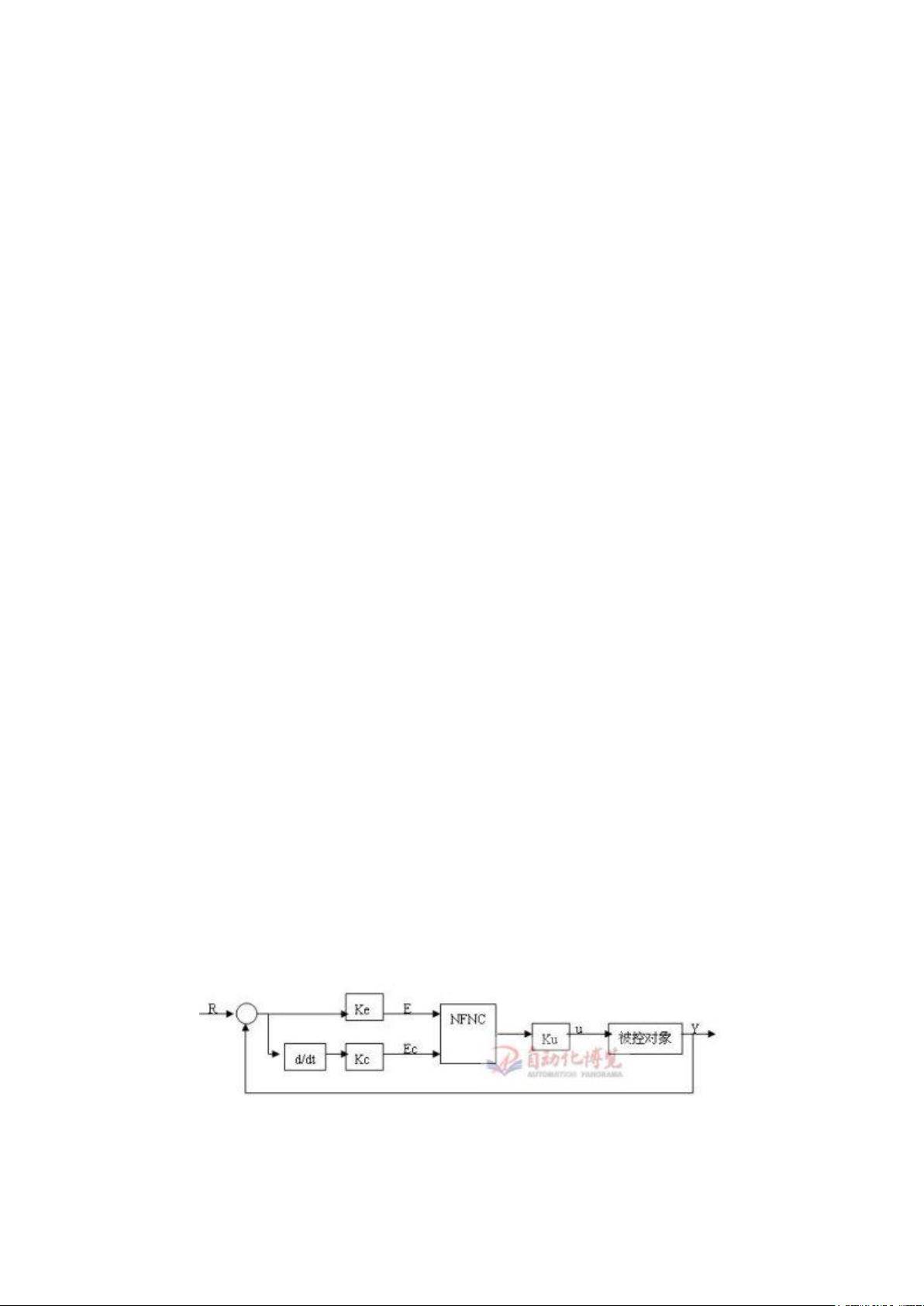
数进行调整。自适应模糊神经系统被认为是通过学习能自动产生模糊规则的神经模糊网络系统。神经模糊网络
控制系统的结构图如图 1 所示。其中 NFNC 为神经模糊网络控制器;R 为输入信号;E、EC 分别为误差及误差变
化量化后的模糊量;Ke、Kc 为量化因子。
图 1 自适应神经模糊网络控制系统结构图
因此可以说神经模糊网络是具有自适应性的, 并能够根据被控对象和环境的变化来调整控制规则和控
制器的参数。
下载后可阅读完整内容,剩余4页未读,立即下载
2021-06-04 上传
2024-10-25 上传
2024-10-25 上传
2023-05-31 上传
2023-04-26 上传
2024-11-01 上传
2023-06-03 上传









