机器人学导论考试复习及关键概念解析
需积分: 50 194 浏览量
更新于2024-10-10
1
收藏 840KB DOC 举报
"机器人学导论复习题及参考答案.doc"
这篇文档是关于中南大学现代远程教育课程《机器人学导论》的复习资料,包含了名词解释、简答和论述题目,以及计算题。这份资料旨在帮助学生复习和理解机器人学的关键概念和技术。
名词解释题涵盖了一些基本的机器人学概念,例如:
1. 自由度:指机器人可以独立运动的轴的数量,决定了机器人的灵活性。
2. 机器人工作载荷:机器人能够承载的最大重量或力。
3. 柔性手:具有柔韧性的手指,能够适应不同形状和大小的物体。
4. 制动器失效抱闸:当动力中断时,用于保持机器人位置的装置。
5. 机器人运动学:研究机器人各个关节运动如何影响其末端执行器位置的学科。
6. 机器人动力学:研究机器人受力、质量和运动之间的关系。
7. 虚功原理:在力学中,表示力在虚拟位移上所做的功等于零。
8. PWM驱动:通过改变脉冲宽度来调整电机转速的控制方式。
9. 电机无自转:电机在没有外部负载时不会自行旋转的特性。
10. 直流伺服电机的调节特性:描述电机响应速度和稳定性的重要参数。
11. 直流伺服电机的调速精度:电机能够准确控制速度的能力。
12. PID控制:一种闭环控制系统,包括比例、积分和微分三个部分。
13. 压电元件:利用压电效应将机械能转化为电能或反之的设备。
14. 图像锐化:图像处理技术,增强图像边缘和细节,提高清晰度。
15. 隶属函数:在模糊逻辑中,用于描述模糊集合元素对集合的隶属程度的函数。
16. BP网络:反向传播神经网络,常用于学习和预测任务。
17. 脱机编程:不在现场而是通过计算机进行机器人程序编写。
18. AUV:自主水下机器人,无需人工操作能在水下自主行动的设备。
简答题涉及了机器人学的各个方面,包括机器人学的研究内容、机身和臂部配置、拉格朗日方程、控制系统、电机额定值、传感器类型、超声波传感器原理、视觉系统组成、图像预处理、模糊控制器结构、编程语言分类以及仿人机器人关键技术等。
论述题则深入探讨了机器人技术的发展趋势、精度与重复精度的关系、不同行走机构的特点和应用、机器人静力学、动力学和运动学的关系,以及单关节伺服控制的增益确定方法、工业机器人应用准则等复杂问题。
计算题部分涉及到几何变换、机械臂的运动学方程、关节旋转变量计算、力和驱动力的分析等实际应用问题,需要学生具备扎实的数学基础和机器人学知识来解答。
这些复习题和答案对于准备机器人学考试的学生来说是一份宝贵的资源,可以帮助他们巩固理论知识,提高解决问题的能力。
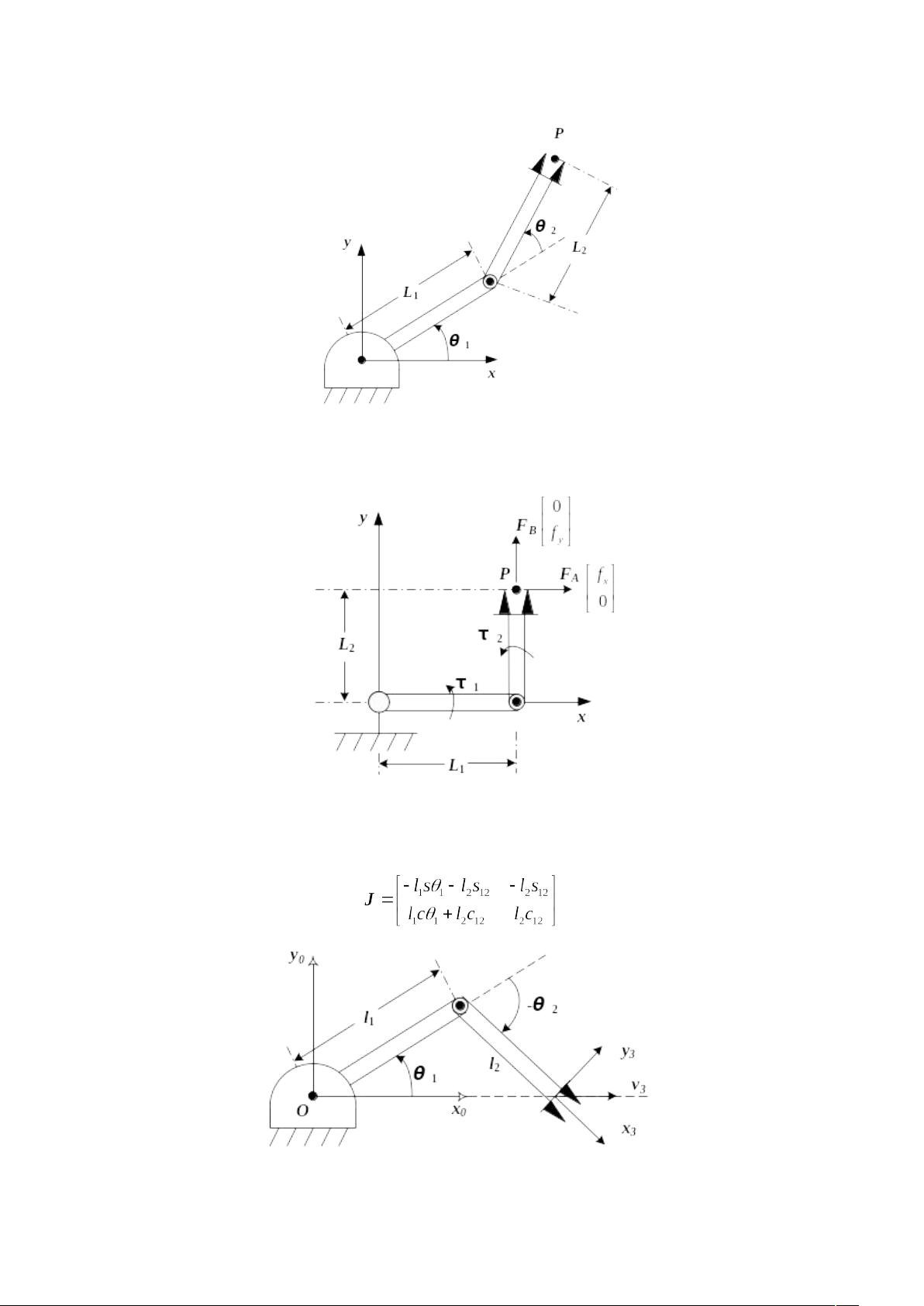
4.如图所示两自由度机械手在如图位置时(θ
1
= 0 , θ
2
=π/2),生成手爪力 F
A
= [ f
x
0 ]
T
或 F
B
= [ 0
f
y
]
T
。求对应的驱动力 τ
A
和 τ
B
。
5.如图所示的两自由度机械手,手部沿固定坐标系在手上 X
0
轴正向以 1.0m/s 的速度移动,杆长
l
1
=l
2
=0.5m。设在某时刻 θ
1
=30°,θ
2
=-60°,求该时刻的关节速度。已知两自由度机械手速度
雅可比矩阵为
3
剩余12页未读,继续阅读
1652 浏览量
362 浏览量
6247 浏览量
2023-07-12 上传
2023-07-12 上传
2024-11-09 上传
2024-11-09 上传

lrcalr
- 粉丝: 2
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 100课AE系统教程,让你的视频玩转特效功能41-80.rar
- b7a-community-call-samples
- tinykv:基于TiKV模型构建分布式键值服务的课程
- 经典企业电脑模板
- 行业-强化练习-言语3+乌米+(讲义+笔记).rar
- libwdi:USB 设备的 Windows 驱动程序安装程序库-开源
- jQuery版本
- RBAP-Wiki:这是Roblox游戏的官方维基,称为“随机建筑和零件”。
- 字模提取软件合集有问题可以问我
- alien-filter
- pyslam:pySLAM在Python中包含一个单眼视觉Odometry(VO)管道。 它支持基于深度学习的许多现代本地功能
- SpringBoot之rpm打包文档.rar
- 距离标度:一种改进基于密度聚类的距离标度方法-matlab开发
- yarl:另一个URL库
- 信息系统项目管理师论文真题范文汇总.zip
- ICLR 2021上关于【NLP】主题的论文
