SIFT算法详解:不变性特征提取与应用深度解析
SIFT算法详解及应用深入探讨
SIFT,全称为尺度不变特征变换(Scale-Invariant Feature Transform),是一种在计算机视觉领域广泛应用的高级特征检测和描述算法。由英国哥伦比亚大学的大卫·劳埃德教授在1999年提出,旨在解决传统特征提取方法在面对光照变化、不同视角、尺寸缩放等场景下匹配不稳定的问题。SIFT的核心思想是设计一种特征描述符,使得它们在图像的尺度、旋转和轻微的平移下仍能保持不变性。
SIFT算法的实现包括以下几个关键步骤:
1. **尺度空间金字塔**:通过构建多尺度的空间金字塔,确保在不同尺度上都能找到稳定的特征点。这样可以应对目标物体因缩放而带来的尺寸变化。
2. **极值检测**:在每个尺度上寻找像素强度的局部极大值点,这些点被认为是可能的特征候选点。为了提高稳定性,劳埃德教授引入了DoG(Difference of Gaussian)算子来检测稳定的极值点。
3. **方向分配**:在每个候选点周围计算梯度方向直方图,从而得到该点的局部方向分布,进一步提高了特征的旋转不变性。
4. **尺度空间定位**:通过检测极值点在不同尺度上的位置变化,确定特征点的精确位置和尺度。
5. **描述符生成**:使用高斯函数加权的极值点周围邻域的梯度信息,生成一个128维的浮点数向量作为特征描述符,这个向量具有良好的局部不变性和一定的光照不变性。
SIFT算法的应用领域广泛,主要包括但不限于:
- **图像匹配**:在不同的光照、视角和尺寸变化下,SIFT能够可靠地匹配相似的图像区域。
- **物体识别**:在复杂环境中识别物体,如人脸识别、车辆识别等。
- **三维重建**:通过SIFT特征进行相机定位,有助于三维场景的重建。
- **计算机视觉系统**:SIFT常用于视觉SLAM(Simultaneous Localization And Mapping)系统,实现机器人导航和自主驾驶。
随着时间的发展,SIFT算法也经历了一些扩展和改进,例如SURF(Speeded Up Robust Features)算法在性能上有所优化,减少了计算复杂度。然而,SIFT的基本原理和核心思想依然被许多现代深度学习特征提取方法所借鉴。
总结来说,SIFT算法是一个里程碑式的发明,它提供了一种强大且稳健的局部特征提取方法,对于计算机视觉任务中的匹配和识别问题具有深远影响。理解并掌握SIFT的实现细节,有助于在实际项目中提升系统的鲁棒性和准确性。

Scale Invariant Feature Transform
SIFT
2012/3/27 12
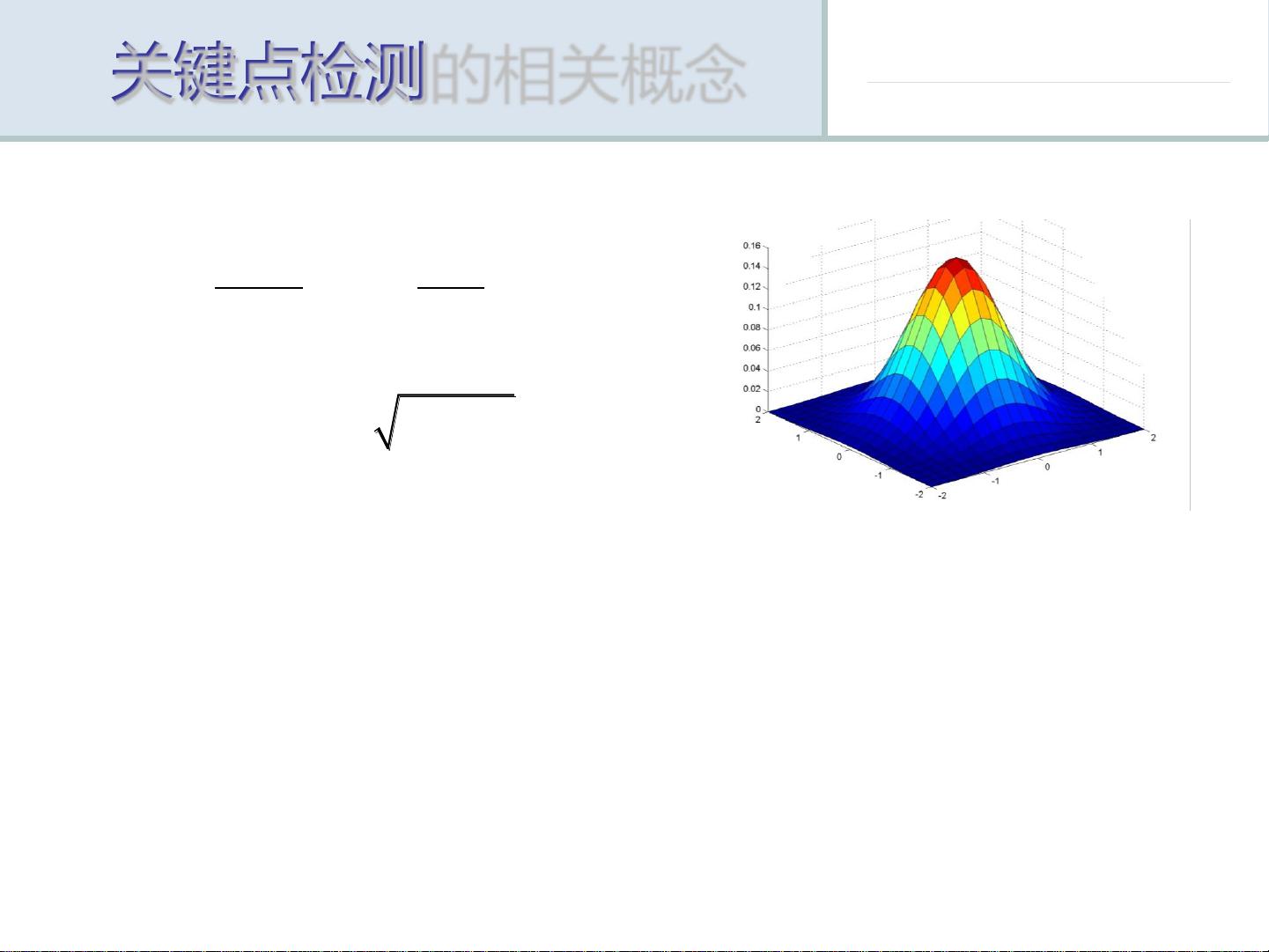
根据文献《Scale-space theory: A basic tool for analysing
structures at different scales》我们可知,高斯核是唯一可以产生
多尺度空间的核,一个图像的尺度空间,L(x,y,σ) ,定义为原始图像
I(x,y)与一个可变尺度的2维高斯函数G(x,y,σ) 卷积运算。
关键点检测
, , , , * ,L x y G x y I x y
22
22
1 ( ) ( )
, , exp
22
ii
ii
x x y y
G x y
高斯函数
尺度是自然存在的,不是人为创造的!高斯卷
积只是表现尺度空间的一种形式…
关键点检测的相关概念

剩余68页未读,继续阅读
2022-09-24 上传
492 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

masikkk
- 粉丝: 1626
- 资源: 105
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
