MPU-60X0 陀螺仪加速度计寄存器详解及配置
需积分: 34 195 浏览量
更新于2024-09-11
收藏 515KB PDF 举报
"MPU-6050是一款集成了三轴加速度计和三轴陀螺仪的传感器,常用于动态运动追踪和姿态测量。该传感器提供了多种测量范围供用户选择,陀螺仪范围从±250到±2000°/秒,加速度计范围从±2到±16g。MPU-6050具有可调节的采样率和数字低通滤波器,以适应不同速度的运动跟踪需求。同时,它还支持外部时钟输入,并有内建振荡器,其频率在工作温度范围内有±1%的变化。"
MPU-6050寄存器详解:
1. Register 25 - SampleRateDivider (SMPRT_DIV): 这个8位无符号寄存器用于设定陀螺仪输出的分频,从而决定采样频率。采样率与陀螺仪输出率的关系为采样率 = 陀螺仪输出率 / (1 + SMPLRT_DIV)。该采样率不仅影响陀螺仪输出,还决定了传感器寄存器输出、FIFO输出、DMP采样和运动检测的频率。如果数字低通滤波器未启用,陀螺仪输出带宽为8kHz,启用后则为1kHz。
2. Register 26 - Configuration (CONFIG): 此寄存器包含两个主要配置项。EXT_SYNC_SET用于设置帧同步引脚的采样,可以根据需要配置外部信号的同步。DLPF_CFG则用来配置数字低通滤波器(DLPF),DLPF的作用是降低信号的高频噪声,提高稳定性。不同的DLPF_CFG值会对应不同的加速度计和陀螺仪滤波特性,以适应不同应用场景的需求。
3. Register 27 - Gyroscope Configuration (GYRO_CONFIG): 该寄存器允许用户进行自测试,比如设置XG_ST和YG_ST位,可以分别对X轴和Y轴陀螺仪进行自我测试,以验证传感器的正确性。ZG_ST位则对应Z轴陀螺仪的自我测试功能。
MPU-6050的使用涉及多个方面,包括电源管理、I2C通信、数据读取、滤波设置等。在编程时,通常需要通过设置这些寄存器来调整传感器的工作模式,如采样率、滤波器带宽以及自我测试等,以确保获取到准确且实时的运动数据。此外,理解每个寄存器的功能对于优化传感器性能、减少噪声和提高系统稳定性至关重要。在实际应用中,开发者需要根据具体项目的需求,仔细阅读官方数据手册,以确保MPU-6050能够正确高效地工作。
MPU-60X0 对陀螺仪和加速度计分别用了三个 16 位的 ADC,将其测量的模拟量转化
为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,
陀螺仪可测范围为±250,±500,±1000,±2000°/秒( dps),加速度计可测范围为±2 ,±4 ,±8 ,
±16g。
在网上找了一会,好像 MPU-6050 没有中文的数据手册,由于本人也处于学习阶段,翻
译的可能不太准确,只能表达一下简单的意思,以官方数据手册为准。
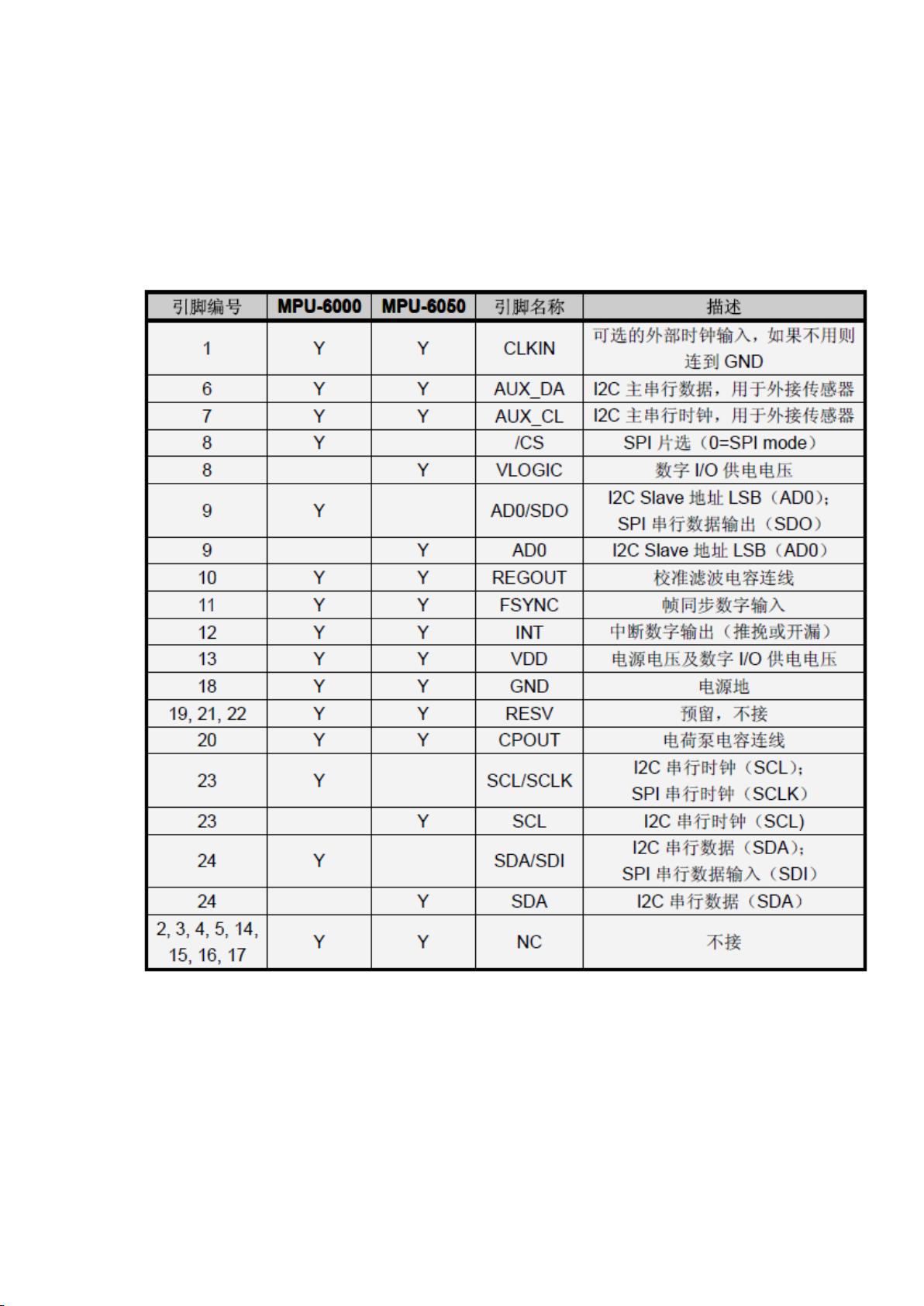
引脚说明:
VDD 供电电压为 2.5V±5%、3.0V±5%、3.3V±5%;VDDIO 为 1.8V± 5%
内建振荡器在工作温度范围内仅有±1%频率变化。可选外部时钟输入 32.768kHz 或 19.2MHz
下载后可阅读完整内容,剩余7页未读,立即下载
177 浏览量
150 浏览量
193 浏览量
2021-12-04 上传
207 浏览量
589 浏览量
324 浏览量
172 浏览量
703 浏览量

老乌龟
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 保护栏:从OpenAPI规范中生成有原则的代码
- BootstrapTask
- webapp:模拟社交媒体统计网站
- 园区交换机(Visio图标)
- ISI:类似 Eliza 的聊天机器人
- 具有Django和A-Frame的360 Image Web Gallery
- adapter-change_management:Itential学院IDEV102 Itential Adapter Essentials II课程
- PHP解析器:用PHP编写PHP解析器
- FreeIva:Kerbal Space Program的进行中模块,允许在IVA上坐下并在船上四处走动
- 心理测评操作材料.rar
- jdk-8u271-linux64 版本
- 易语言-易语言制作属于你的系统一键备份还原
- Bicycles HD Wallpapers Bikes New Tab Theme-crx插件
- fetching
- AppTracker前端
- react-helmet:React的文档主管
