虚拟斜坡法:双足机器人楼梯行走轨迹规划
"本文提出了一种名为‘虚拟斜坡方法’的双足机器人楼梯行走轨迹规划技术,用于解决在楼梯行走时零时刻点(ZMP)的计算问题。该方法解决了传统方法在楼梯行走中遇到的两个主要问题:ZMP方程问题和ZMP定义问题。在传统的楼梯行走规划中,ZMP在楼梯上的计算方式与平地不同,导致无法直接应用平地的轨迹生成策略,这是‘ZMP方程问题’。其次,在楼梯的双支撑阶段,脚的接触点不构成一个平面,使得ZMP无法被定义,这是‘ZMP定义问题’。虚拟斜坡方法通过将楼梯视为一个虚拟斜面,同时解决了这两个问题。"
在双足机器人行走过程中,零时刻点(Zero-Moment Point, ZMP)是一个关键的概念,它代表了机器人在行走时重心转移的瞬时位置。在平地上,ZMP的计算相对简单,但在楼梯环境中,由于接触地面的几何形状变化,计算变得复杂。传统的楼梯行走算法往往不能很好地处理这种复杂性。
虚拟斜坡方法是解决这一挑战的一种创新策略。它通过数学建模将实际的楼梯环境转化为一个虚拟的斜坡场景。这样,机器人在楼梯上的步态可以转换为在斜坡上行走的步态,使得ZMP的计算和轨迹规划可以沿用在斜坡上行走的规则。这种方法的优势在于,它能够在保持机器人稳定行走的同时,确保ZMP始终在一个可定义的平面上,从而有效地解决了ZMP的定义问题。
具体实施时,首先,机器人需要实时感知楼梯的几何特征,如台阶的高度、宽度等。然后,利用这些信息构建虚拟斜坡模型。接着,根据虚拟斜坡模型,计算每个步态周期内ZMP的运动轨迹。在这个过程中,机器人需要不断地调整其姿态,以保持ZMP位于支撑足所在的平面内,保证行走的稳定性。
为了实现精确的步态控制,机器人控制系统需要结合动力学模型、传感器数据以及运动规划算法。例如,利用惯性测量单元(IMU)和压力传感器获取实时的运动状态和接触信息,同时结合模型预测控制或优化算法来计算出合适的关节运动指令。
此外,论文可能还涉及了实验验证和性能评估,包括在模拟环境和真实世界中的测试,以证明虚拟斜坡方法在实际应用中的可行性和有效性。通过这些实验,作者可能展示了该方法对于不同楼梯结构和速度的适应性,以及在复杂环境下的稳健性。
"双足机器人楼梯行走轨迹规划"是机器人学领域的一个重要研究方向,而虚拟斜坡方法提供了一种有效解决楼梯行走中ZMP计算难题的途径,对于提升双足机器人的自主导航能力和环境适应性具有重要意义。
SATO et al.: WALKING TRAJECTORY PLANNING ON STAIRS USING VIRTUAL SLOPE FOR BIPED ROBOTS 1387
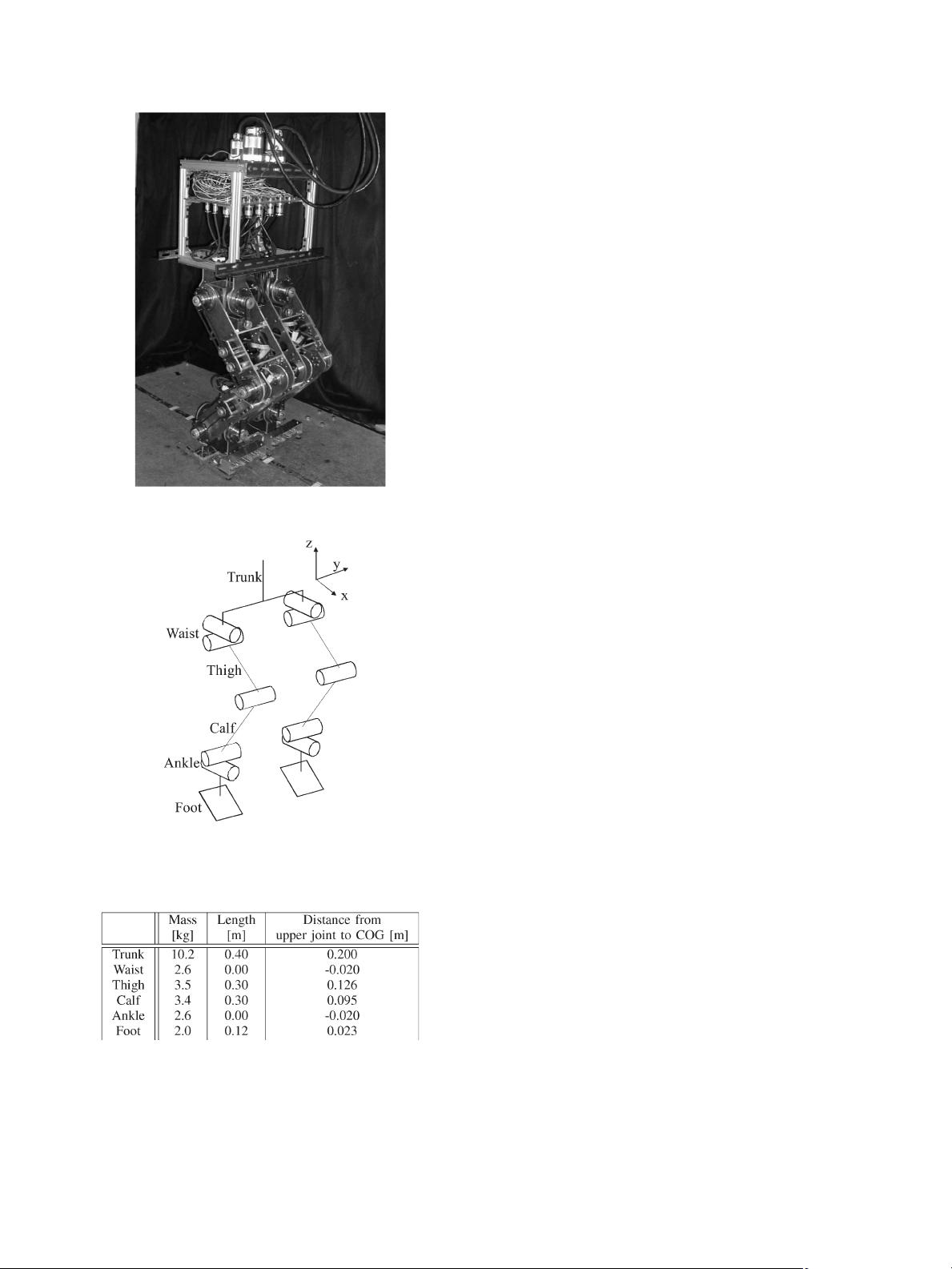
Fig. 1. Overview of the robot.
Fig. 2. Three-dimensional model of the robot.
TABLE I
P
ARAMETERS OF THE LINKS
the 11-mass COG model. Table I shows the parameters of the
links. The length of the foot in the forward direction is 0.26 m.
The origin of the coordinate is set on the ground just under
the ankle joint at the time of the walk start. The x-axis is the
forward direction, the y-axis is the horizontal direction, and
the z-axis is the vertical direction. In this research, the stairs
of the forward direction are considered. In addition, the step of
the stairs is assumed to be flat terrain.
B. Controller
The proportional–derivative (PD) controller and disturbance
observer [38] are applied to the biped robot in this research.
The position and the posture of the robot are controlled to
track the desired trajectory by the PD controller. In order
to compensate disturbances (gravity, friction, and so on), a
disturbance observer is used. The postures of the robot are
controlled to become always parallel to the step of the stairs.
Using the trajectories based on the ZMP as the command values
of the controller, the stable walking is realized. The referential
value of the PD controller is obtained as
¨
x
ref
= K
p
(x
cmd
− x
res
)+K
v
(
˙
x
cmd
−
˙
x
res
) (1)
where
¨
x
ref
, x
cmd
, and x
res
denote the acceleration referential
vector, the position command vector, and the position response
vector, respectively. These vectors are 10-D vectors on the 3-D
space. In addition, K
p
and K
v
denote the position feedback
gain and the velocity feedback gain, respectively.
In this research, pseudoderivation is used for the derivation of
the r esponse. Additionally, the variable compliance controller
[39] is implemented on the swing leg for impact reduction of
the landing in the z-direction. To prevent the destabilization
of walking, the impact of the landing is suppressed by this
controller. The referential value of the variable compliance
controller is obtained as
¨z
ref
= K
p
z
cmd
− z
cmd
c
− z
res
+ K
v
˙z
cmd
− ˙z
cmd
c
− ˙z
res
− ¨z
cmd
c
(2)
K
c
C
f
F
ext
= M
c
¨z
cmd
c
+ D
c
˙z
cmd
c
+ K
c
z
cmd
c
(3)
C
f
=
C
fo
tanh(a
i
F
ext
)(F
ext
≥ 0)
0(F
ext
< 0)
(4)
where z
cmd
c
denotes the compliance command value with the
characteristic of (3). F
ext
denotes the external force. In addi-
tion, M
c
, D
c
, and K
c
denote the mass, damper, and spring
values of the virtual impedance, respectively. C
f
denotes the
variable feedback gain. C
fo
and a
i
denote arbitrary coefficients.
III. T
RAJECTORY PLANNING ON STAIRS
In this section, the trajectory planning of the biped robot on
stairs is explained. In Section III-A, the problems of trajectory
planning on the stairs are explained in detail. In Section III-B,
the virtual slope method for the solution is proposed. In
Section III-C, the trajectory planning procedure based on the
virtual slope method is explained. In Section III-D, the COG
trajectory generation method of this research is explained.
A. Problems of Trajectory Planning on Stairs
In this section, the ZMP equation problem and the ZMP
definition problem are explained.
1) ZMP Equation Problem: First, the ZMP equations of
three cases (the flat ground, the slope, and the stairs) are shown.
Second, the ZMP equation problem is explained. Fig. 3 shows
剩余11页未读,继续阅读
207 浏览量
131 浏览量
点击了解资源详情
172 浏览量
1057 浏览量
2021-08-13 上传
193 浏览量
104 浏览量
141 浏览量

幸运罐子
- 粉丝: 15
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 《Velocity1.4 模板使用指南中文版》
- 一些vfp实用代码如登录界面代码 打印代码
- ALV编程手册(An Easy Reference for ALV GRID CONTROL.)
- SVN操作入门指南.pdf
- 谭浩强_C++程序员设计_pdf(将各章整合都一起了)
- OpenDoc-CruiseControl.pdf
- DataWindow .net 汉化版 电子书
- 持续集成配置.pdf
- MT6228手机基带IC PDF档
- Const的所有用法by Dan Saks
- 深入浅出Struts 2.pdf
- AN INTRODUCTION TO STOCHASTIC
- web.xml详细配置说明
- javaweb ATA认证题库
- 整合Flex和Java--配置篇
- svn使用说明的PPT
