"二自由度机器人控制仿真研究"
版权申诉
114 浏览量
更新于2024-04-19
收藏 1.62MB DOC 举报
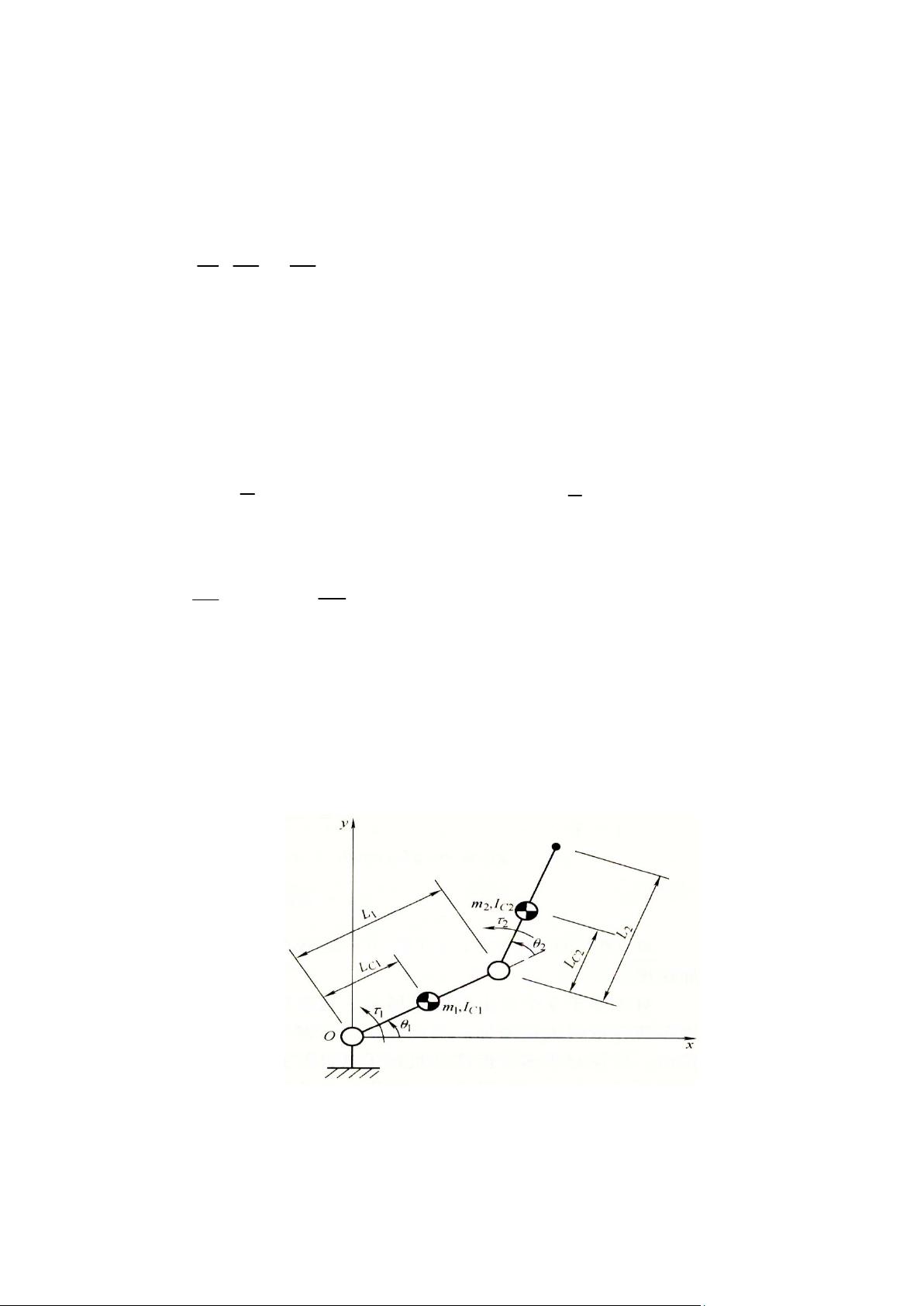
Robotic___________is a highly interdisciplinary and rapidly developing field that has attracted widespread interest from individuals with diverse backgrounds, including mechanical engineering, biology, anthropology, computer science, control theory and engineering, electronics engineering, artificial intelligence, and sociology. This graduation project focuses on the position control of a two-degree-of-freedom robot, utilizing the PD control method and employing MATLAB language, Simulink, and the Robot Toolbox to construct the geometric and dynamic models of the robot. A controller model is designed and implemented, with controller parameters adjusted to effectively control the robot's pose and achieve satisfactory control results. This project contributes to the advancement of robotic technology, specifically in the area of controlling two-degree-of-freedom robots for various applications.

N
F
r
=
(2.3)
式中,
q
&&
和
N
是绕轴回转的角加速度和惯性矩。将式(2.1)、(2.2)
带入式(2.3),得到
2
mr N
q
=
&&
(2.4)
则把式(2.4)改写,变为
I N
q
=
&&
(2.5)
2
I mr=
(2.6)
式(2.6)是质点绕固定轴进行回转时的运动方程式。I 相当于平移运动
是时的质量,称之为惯性矩。
求质量连续分布物体的惯性矩时,可以将其分割成假想的微小的物体,
然后再把每个微笑物体的惯性矩加在一起。这时,微小物体的质量
dm
、极
其微小体积
dV
的关系,可用密度
r
表示为
dm dV
r
=
(2.7)
所以,微小物体的惯性矩
2 2
dI dmr r dV
r
= =
(2.8)
因此,整个物体的惯性矩可像下式那样,作为于体积有关的积分值来求
解。
2
I dI r dV
r
= =
ò ò
(2.9)

剩余56页未读,继续阅读
2023-07-11 上传
2023-07-12 上传
2023-07-11 上传
2023-07-11 上传
2020-06-12 上传

omyligaga
- 粉丝: 87
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
