AUTOSAR CANDriver规范概述
版权申诉
"AUTOSAR_SWS_CANDriver.pdf 是一份关于AUTOSAR(AUTomotive Open System ARchitecture)中CAN(Controller Area Network)驱动器的规范文档,主要涉及智能驾驶和车辆标准。这份文档在不同的版本中进行了多次更新和优化,包括功能的添加、错误修正以及对原有功能的详细描述。"
AUTOSAR是一种开放的汽车软件系统架构,旨在提高汽车电子和软件系统的可复用性、可扩展性和可维护性。CAN驱动器是AUTOSAR中关键的组件之一,用于处理与CAN总线的通信。该文档详细规定了CAN驱动器的实现和行为,确保它能在不同车辆电子系统中兼容和高效地工作。
在R20-11版本中,主要变化包括:
1. 移除了Pretended Networking功能。
2. 添加了CanDrv_CONSTR_00512的新约束。
3. 更新了ECUC_Can_00471的描述。
4. 新增了一个参数:CanObjectPayloadLength,用于指定CAN对象的负载长度。
5. 对SWS_Can_00403添加了注释。
6. 修改了SWS_Can_00222的内容。
7. 进行了轻微的修正、澄清和编辑性改动。
8. 增加了CAN错误类型的报告章节,引入了SWS_Can_91021的要求。
9. 添加了CanEnableSecurityEventReporting容器,增强了安全事件报告功能。
R19-11版本主要进行了文档状态的更新,从Final变为published,并进行了少量的修正、澄清和编辑性改动。
4.4.0版本的主要更新包括:
1. 引入了MCAL(Microcontroller Abstraction Layer)多核分布作为草案(CONC_639)。
2. 实现了总线镜像功能(CONC_634)。
3. 对头文件进行了清理。
4. 将ChannelId替换为ShortName,用于多个主要函数(如SWS_Can_00441和SWS_Can_00442)。
5. 进行了小规模的修正、澄清和编辑性改动。
这些变更反映了AUTOSAR对CAN驱动器功能和性能的持续改进,以适应不断发展的智能驾驶和车辆通信需求。通过这样的标准化,开发人员可以更容易地集成和管理车载网络系统,确保软件组件之间的互操作性,同时提高整个汽车电子系统的可靠性和安全性。
Specification of CAN Driver
AUTOSAR CP R20-11
16 of 112 Document ID 11: AUTOSAR_SWS_CANDriver
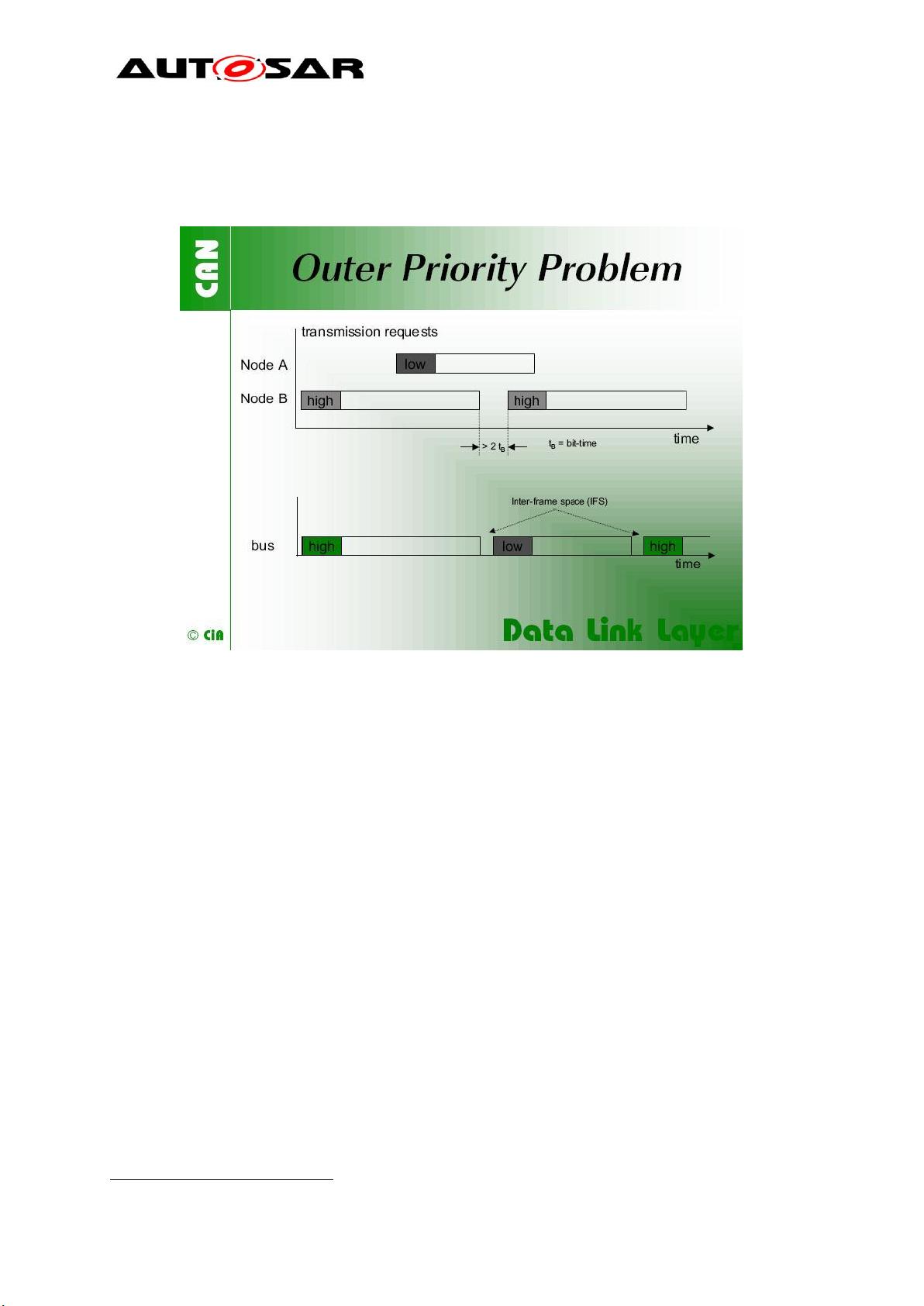
“The problem of outer priority inversion may occur in some CAN implementations. Let
us assume that a CAN node wishes to transmit a package of consecutive messages
with high priority, which are stored in different message buffers. If the interframe
space between these messages on the CAN network is longer than the minimum
space defined by the CAN standard, a second node is able to start the transmission
of a lower priority message. The minimum interframe space is determined by the
Intermission field, which consists of 3 recessive bits. A message, pending during the
transmission of another message, is started during the Bus Idle period, at the earliest
in the bit following the Intermission field. The exception is that a node with a waiting
transmission message will interpret a dominant bit at the third bit of Intermission as
Start-of-Frame bit and starts transmission with the first identifier bit without first
transmitting an SOF bit. The internal processing time of a CAN module has to be
short enough to send out consecutive messages with the minimum interframe space
to avoid the outer priority inversion under all the scenarios mentioned.”
2
2
Text and image by CiA (CAN in Automation)


剩余111页未读,继续阅读
2020-04-23 上传
2023-09-03 上传
2024-01-30 上传
2023-05-08 上传
2023-07-24 上传
2023-12-08 上传
2023-08-21 上传

电动汽车控制与安全
- 粉丝: 263
- 资源: 4186
 我的内容管理
展开
我的内容管理
展开







最新资源
- 最优条件下三次B样条小波边缘检测算子研究
- 深入解析:wav文件格式结构
- JIRA系统配置指南:代理与SSL设置
- 入门必备:电阻电容识别全解析
- U盘制作启动盘:详细教程解决无光驱装系统难题
- Eclipse快捷键大全:提升开发效率的必备秘籍
- C++ Primer Plus中文版:深入学习C++编程必备
- Eclipse常用快捷键汇总与操作指南
- JavaScript作用域解析与面向对象基础
- 软通动力Java笔试题解析
- 自定义标签配置与使用指南
- Android Intent深度解析:组件通信与广播机制
- 增强MyEclipse代码提示功能设置教程
- x86下VMware环境中Openwrt编译与LuCI集成指南
- S3C2440A嵌入式终端电源管理系统设计探讨
- Intel DTCP-IP技术在数字家庭中的内容保护
