
ARM+DSP的嵌入式四轴运动控制器设计的嵌入式四轴运动控制器设计
运动控制系统已被广泛应用于工业控制领域。近年来,工业控制对运动控制系统的要求越来越高。传统的基于
PC及低端微控制器日渐暴露出高成本、高消耗、低可靠等问题,已经不能满足现代制造的要求 。随着嵌入式技
术的日益成熟,嵌人式运动控制器已经初露锋芒。基于ARM技术的微处理器具有体积小、低成本、低功耗的特
点,决定其在运动控制领域具有良好的发展前景。 PCL6045BL是一种新型专用DSP运动控制芯片,它具有强
大的数据处理能力和较高的运行速度,可以实现高精度的多轴伺服控制。为解决精密制造对低成本、可移植性
强的通用型多轴数控系统的迫切需求,文中给出一种基于ARM 微处理器S3C2440与DSP运动控
运动控制系统已被广泛应用于工业控制领域。近年来,工业控制对运动控制系统的要求越来越高。传统的基于PC及低端微
控制器日渐暴露出高成本、高消耗、低可靠等问题,已经不能满足现代制造的要求 。随着嵌入式技术的日益成熟,嵌人式运
动控制器已经初露锋芒。基于ARM技术的微处理器具有体积小、低成本、低功耗的特点,决定其在运动控制领域具有良好的
发展前景。
PCL6045BL是一种新型专用DSP运动控制芯片,它具有强大的数据处理能力和较高的运行速度,可以实现高精度的多轴伺
服控制。为解决精密制造对低成本、可移植性强的通用型多轴数控系统的迫切需求,文中给出一种基于ARM 微处理器
S3C2440与DSP运动控制芯片PCL6045BL构成的嵌入式四轴运动控制器。该运动控制器具有高性能、低成本、体积小、可独
立运行等特点,可以满足运动控制系统高速、高精度的 要求。它可广泛应用于雕刻机、机器人、绣花机以及数控加工等工业
控制领域。
为解决精密制造对低成本、可移植性强的通用型多轴数控系统的迫切需求,给出一种基于ARM微处理器S3C2440和专用
DSP运动控制芯片PCL65045BL组合的嵌入式四轴运动控制器。硬件上该控制器采用ARM+DSP的主从式双CPU结构,结合
ARM在人机界面显示、通信接口方面的优势以及PCL6045BL高控制精度的优点。软件上在S3C2440上移植μC/OS-II实时操作
系统来管理运动控制系统。该控制系统通用性较强,可广泛应用于雕刻机、机器人、绣花机以及数 控加工等工业控制领域。
1 系统总体设计系统总体设计
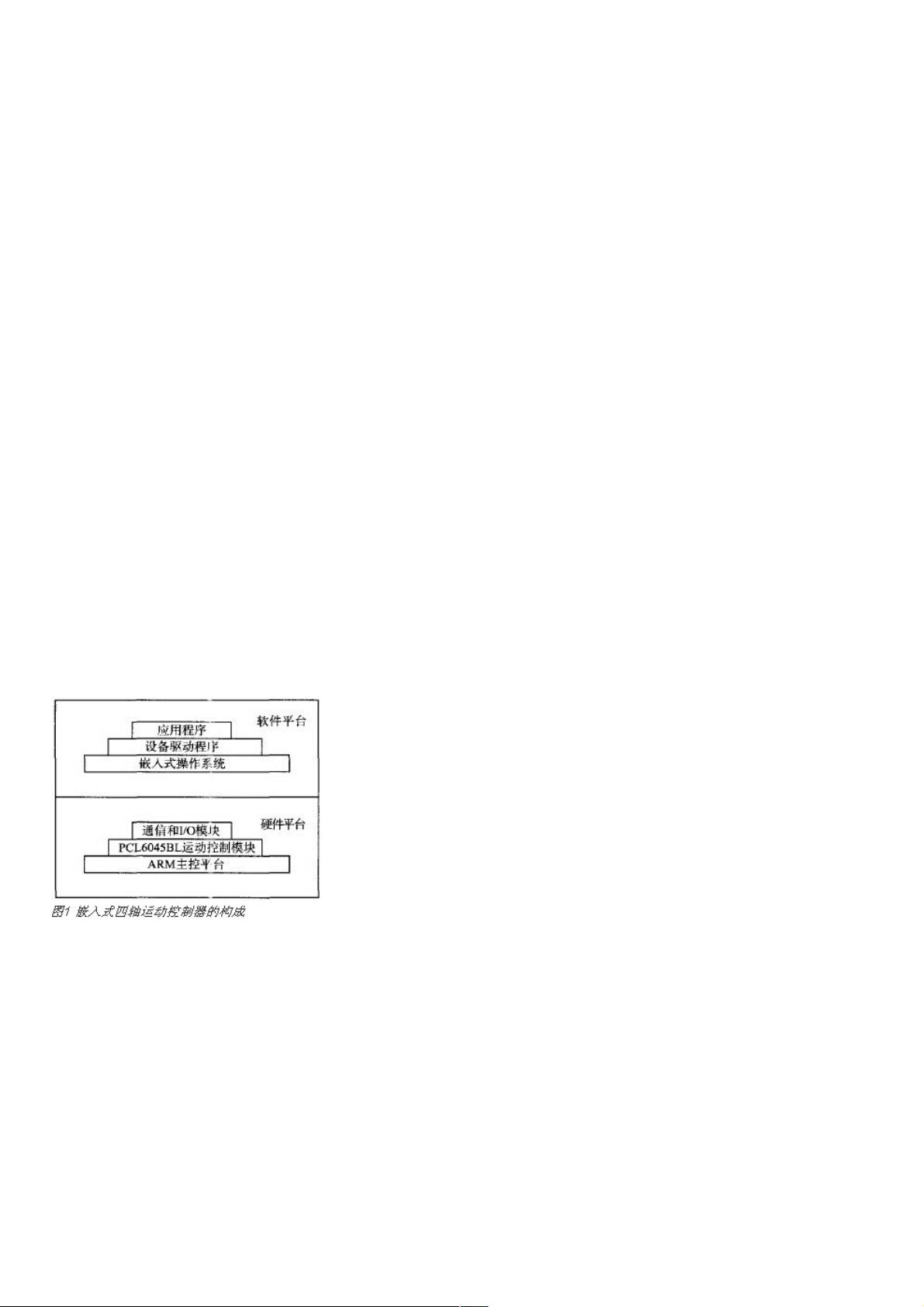
嵌入式四轴运动控制器主要由硬件部分和软件部分构成。
硬件主要包括S3C2440嵌入式主控板和PCL6045BL运动控制板两个部分。S3C2440嵌入式主控板和PCL6045BL运动控制
板之间通过通用的IDE通信接口进行连接。
软件方面在硬件平台的基础上移植S3C2440实时嵌入式操作系统,设计Boot Loader、外设驱动以及运动控制系统的应用程
序。采用上述的软硬件平台,嵌入式运动控制器可以达到开放性能好、精度高的要求。本嵌入式四轴运动控制器的结构如图1
所示。
ARM具有丰富的片内外围电路,如USB接口、IIS接口、LCD控制器等,在人机界面的显示、通信接口以及系统移植方面具
有更强大的功能。PCL6045BL运动控制芯片速度快,可靠性高,性能好,在运动控制方面有很大的优势。
实时操作系统μC/OS-II包含了实时内核、任务管理、时间管理、任务间通信同步和内存管理等功能,可以使各个任务独立工
作,互不干涉,很容易实现准时而且无误地执行,使实时应用程序的设计和扩展变得容易,使应用程序的设计过程大为减化
。将S3C2440处理器、PCL6045BL 以及μC/OS-II三者的优势应用到本嵌入式四轴运动控制器中可以使其具有强大的功能,并
缩短开发时间。
本嵌入式四轴运动控制器以S3C2440为主控平台,在ARM上移植μC/OS-II实时操作系统来进行人机界面的显示、I/O的管
理、任务问的通信、指令的编译等工作。PCL6045BL运动控制模块主要负责位置控制,插补驱动,速度控制。用户的指令通
过S3C2440指令编译系统的编译,通过与PCL6045BL之问的专用通信接口来控制DSP运动控制芯片发出脉冲以达到使伺服电
机高速运行。
2 系统硬件设计系统硬件设计
2..1 系统硬件平台设计系统硬件平台设计
在控制系统中,以S3C2440处理器为主控,PCL6045BL运动控制芯片为从CPU,构建的嵌入式运动控制器结构如图2所
示。
下载后可阅读完整内容,剩余3页未读,立即下载

weixin_38572979
- 粉丝: 4
- 资源: 933
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


