四足步行机器人追光控制系统设计与实现
版权申诉
178 浏览量
更新于2024-06-23
收藏 6.53MB DOC 举报
"该文档详细介绍了会追光的四足步行机器人的研究与设计过程,包括机器人的原理、搭建、步态设计、程序设计以及追光功能的实现。"
四足步行机器人是一种仿生学技术的体现,它通过模仿动物的行走方式来实现稳定移动。在本研究中,四足步行机器人的设计主要关注其追光能力,这使得机器人可以在光照条件变化的环境中自主导航。四足机器人的优点在于它们具有较高的承载能力和良好的稳定性,而且相对两足和多足机器人而言,结构更为简洁。
步态规划是设计的核心部分,决定了机器人的行走方式。简单的步态设计可能包括前进步态和转向步态,而改进的步态设计则考虑了更复杂的动态平衡和转向策略。前进步态包括了每个腿的顺序抬起和放下,而转向步态则需要不同腿的配合以改变机器人的运动方向。
在搭建四足步行机器人时,采用了特定的器件,如CDS5500数字舵机用于控制机器人的关节运动,MultiFLEX™2-AVR控制器作为核心处理单元,以及多功能调试器进行程序的编写和测试。组装过程中涉及了腿部、躯干和头部的连接,并详细列出了所需零件清单和连接步骤。
程序设计方面,首先需要对舵机进行ID编号和模式设置,以便控制器能准确地控制每个舵机。舵机位置序列的设定则决定了机器人每一步的运动轨迹。程序逻辑设计涵盖了初始化设置和延迟等待,确保机器人能按预期执行指令。程序的下载和运行通过ATmega128和ATmega8微控制器的串口通讯完成,经过编译后下载到控制器中。
追光设计是这个项目的特色功能,通过传感器检测光线来源,结合不同的步态实现机器人的转向和前进。对于简单步态的追光设计,机器人可以通过左转、右转或前进来调整朝向。而在改进的步态追光设计中,优化了转向和前进的策略,使机器人能更有效地追踪光源。
总结中提到,经过实验验证,设计的四足步行机器人成功实现了追光功能,证明了这种设计的有效性。这不仅在科研上有重要意义,还可能在实际应用如搜索救援、环境监测等领域发挥重要作用。

上就有天然的优势。四足机器人是介于最困难的仿人机器人和相对容易的多足机器人之
间,是最典型的腿式机器人研究平台。四足机器人如果在任何时刻都是单腿迈动,可以
保持静平衡,如果有 2 条腿同时迈动,将不能保持静平衡。
1.2 机器人设计原理
机器人整体的设计原理:头部的光敏传感器观察到目标物后,产生返回值左部光
强_x 和右部光强_y 值,将两者之差返回到控制器。控制器根据对应的光强之差发出指
令,进行相应的步态,实现追光行为。
1.2.1 步态规划
腿式机器人在运动过程中,各腿交替呈现两种不同的状态:支持状态和转移状态。
腿处于支持状态时,腿的末端与地面接触,支持机器人的部分重量,并且能够通过蹬腿
使机器人的重心移动;处于转移状态时,腿悬空,不和地面接触,向前或向后摆动,为
下一次迈步做准备。
步态的定义是:腿式机器人各条腿的支持状态与转移状态随着时间变化的顺序集合。
对于匀速前进的机器人,步态呈周期性变化,我们将这种步态称之为周期步态。更加智
能的机器人,能够根据传感器获取地面状况和自身的姿态,进而产生实时的步态。这种
步态称为随机步态或实时步态。
周期步态中,所有腿支持状态的时间之和与整个周期的比值,称为步态占空比。如
果占空比是 0.75,说明不管任何时候,四足机器人一定有 3 条腿支持躯体,机器人处于
静平衡状态。如果机器人一直用 4 条腿站着不动,这步态占空比是 1,因为支持状态时
间和与周期相等。所以,0.75≤步态占空比≤1 时,机器人处于静平衡状态,这种步态称
为静平衡步态;反之如果步态占空比<0.75,机器人处于非静平衡状态,需要借助运动
时的惯性力、严格的时序,才能让机器人保持平衡,这种步态称为动平衡步态。
根据上述的分析,得出几个结论:
1、 如果机器人要在运动过程中保持静态平衡,需要在任何时候都有 3 条腿支撑
地面,并且重心位于这三条腿与地面接触点构成的三角形内部。
2、 机器人需要通过腿部运动,主动移动重心,才能实现机器人的整体运动。
1.2.2 任务规划
当机器人有了矫健的躯体、敏锐的眼睛之后,还需要考虑如何让它接近光源。对光
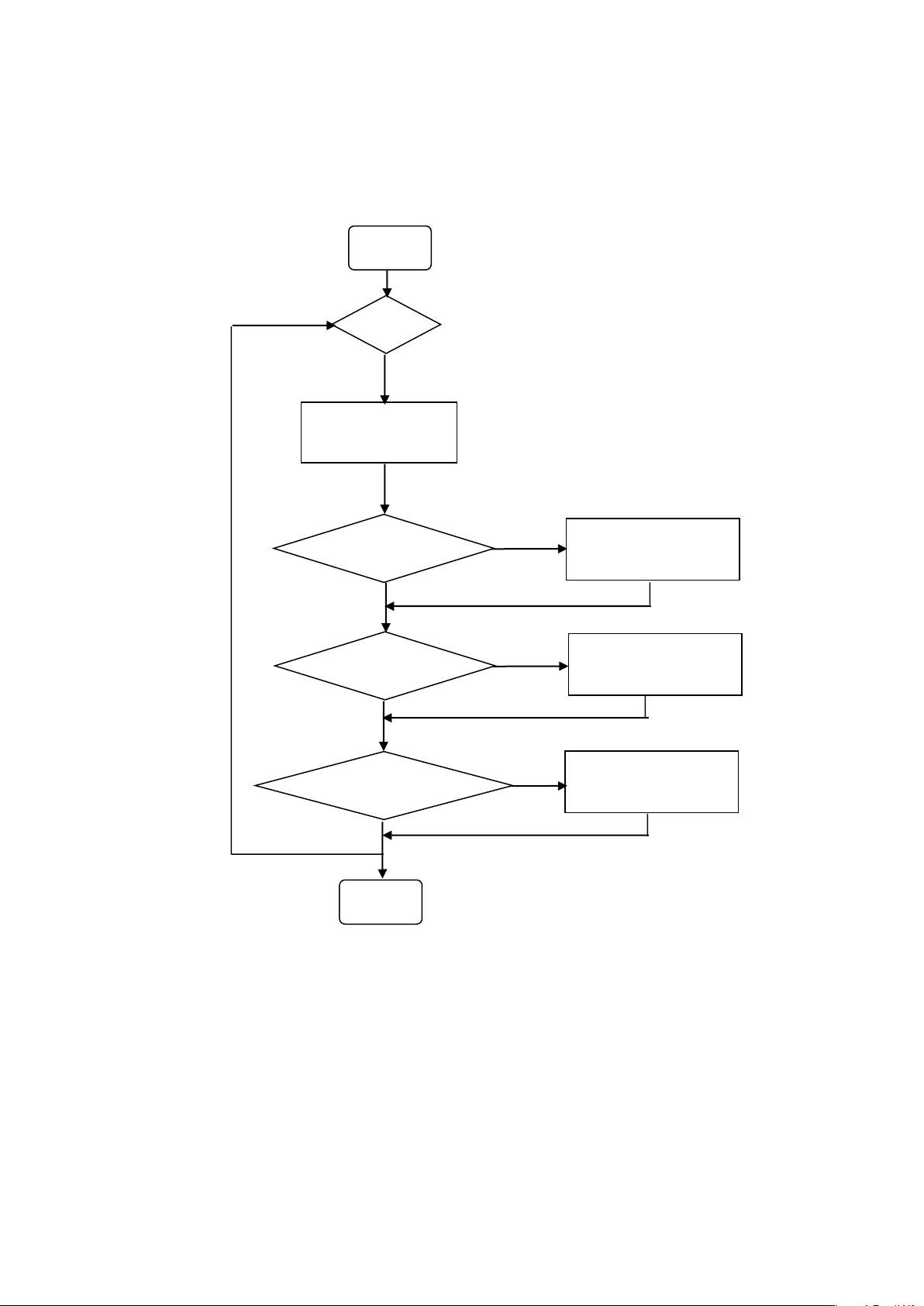
源敏感的传感器只有光敏传感器,可以用它作为机器人的眼睛。程序流程如图 1-2 所示,
通过两只眼睛分辨光源的位置,如果光源在前方则往前移动,如果光源在左就往左移动,
如果在右边则往右边移动。
while
获取光强传感器
AD 值
左边比较亮
右边比较亮

剩余58页未读,继续阅读
点击了解资源详情
点击了解资源详情
224 浏览量
2023-07-11 上传
2023-07-12 上传
2023-07-12 上传
2023-07-12 上传
2022-11-27 上传
2023-07-11 上传

老帽爬新坡
- 粉丝: 99
 我的内容管理
展开
我的内容管理
展开







最新资源
- EAI开发经验分享:Eclipse与WebLogic整合技巧
- Struts教程详解:框架结构与组件配置
- 《信息检索导论》:机器学习与信息检索的结合
- C++ 2005入门:面向对象编程与结构详解
- 高质量C++/C编程规范与指南
- 并发世界中的编程Erlang
- SQL执行计划分析与优化指南
- ARM入门指南:策略与资源推荐
- Maximo6在Eclipse中的集成开发环境配置教程
- C++编程语言选择题答案大全
- InfoQ中文版《深入浅出Struts2》在线阅读
- DHCP入门指南:自动配置与协议详解
- Oracle8i/9i数据库基础教程:SQL*PLUS与PL/SQL详解
- C++程序设计实例解析:运算符优先级与三角形判断
- ARM新手入门指南:从实验到精通
- Oracle 10g概念入门指南:数据库与架构详解
