ADAMS联合MATLAB仿真:机械夹紧机构模型构建详解
需积分: 9 170 浏览量
更新于2024-07-22
收藏 822KB DOC 举报
“matlab与adams的联合仿真案例分析,涉及机械夹紧机构的建模与仿真”
在MATLAB与ADAMS的联合仿真中,两者结合可以实现复杂的机械系统动态分析。MATLAB作为强大的数学计算和算法开发环境,可以进行模型预处理、参数优化以及结果后处理。而ADAMS(Automatic Dynamic Analysis of Mechanical Systems)则是一款专业的机械系统动力学仿真软件,擅长构建和分析多体动力学模型。
在这个特定的案例中,我们关注的是一个机械夹紧机构的建模,这个机构曾用于阿波罗登月计划,用于固定登月舱和宇宙飞船。该机构由摇臂、手柄、锁钩、连杆和固定块等部件组成。其工作原理基于力的放大机制,即在手柄施加一个小力,通过机构转换在锁钩处产生较大的夹紧力。
设计目标是确保至少800N的夹紧力,同时手柄上的操作力不超过80N,并且在振动环境下仍能保持安全可靠的夹紧状态。为了实现这些要求,ADAMS被用来详细建模和仿真这个过程。
在ADAMS中,建模步骤如下:
1. **创建新模型**:首先,用户需要启动ADAMS/View,选择创建新的模型,命名为“Latch”,并设定相关的物理量单位和工作网格。
2. **设置工作环境**:包括设置物理量单位,如力、距离的单位,以及定义工作网格的大小和分布,以精确控制模型的几何细节。
3. **创建设计点**:设计点是构建几何模型的关键,它们作为其他几何元素的位置参考。在这里,用户通过设计点列表编辑器创建了六个设计点,作为后续创建各部件的基础。
4. **构建几何构件**:利用设计点,可以创建各种几何体,如平板(代表摇臂),设置其尺寸属性如厚度和圆角半径。
5. **添加约束**:接下来,通过指定设计点来约束各个组件的运动自由度,比如让某些点固定不动,模拟固定块,或者允许某些点相对运动,模拟铰链连接。
6. **添加载荷**:施加力或力矩到特定部件,例如在手柄上添加操作力,以模拟实际工作情况。
7. **结果后处理**:运行仿真后,用户可以通过ADAMS的可视化工具分析和评估结果,查看各部件的运动轨迹、速度、加速度,以及关键点的力和扭矩,验证是否满足设计要求。
通过这个实例,学习者不仅可以了解ADAMS的基本操作流程,还能深入理解机械系统动力学建模的原理,掌握如何在MATLAB中处理仿真结果,进行数据分析和优化。MATLAB与ADAMS的联合使用,为复杂机械系统的动态分析提供了一种高效且精确的方法。
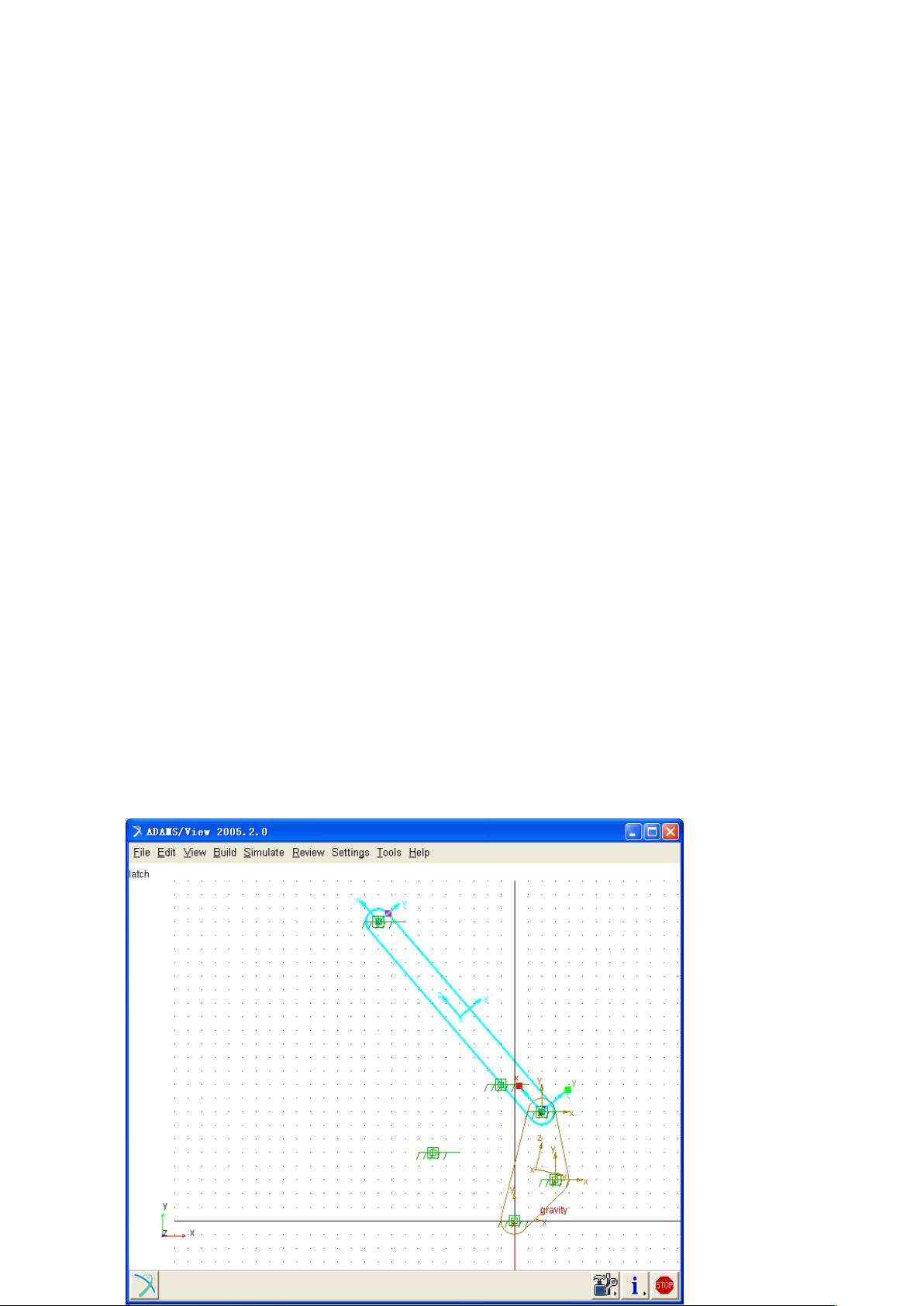
图 7-7 创建摇臂
5、创建手柄(Handle)
选择并点击几何模型库(Geometric Modeling)中的连杆(Link),用鼠标左键选择设计点 :
Point_3 和 Point_4,完成手柄(Handle)的创建,将其重新命名(Rename)为 Handle,如图 7-8
所示:
剩余19页未读,继续阅读
165 浏览量
109 浏览量
点击了解资源详情
542 浏览量
132 浏览量
点击了解资源详情
192 浏览量
点击了解资源详情
点击了解资源详情


qq_26465085
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
