多机支持:为bringup.launch添加namespace详解
需积分: 23 152 浏览量
更新于2024-08-05
收藏 2.35MB PDF 举报
"这篇文档主要介绍了如何将ROS(机器人操作系统)中的bringup.launch文件修改以支持多机器人环境,特别是通过添加命名空间(namespace)实现。在ROS中,命名空间是一种管理节点和话题的有效方式,尤其在多机器人系统中,避免了不同机器人之间的话题和节点名冲突。"
在ROS环境中,`bringup.launch` 文件通常用于启动一组相关的节点,构建一个完整的机器人系统。原始的bringup功能主要包括以下几个节点:
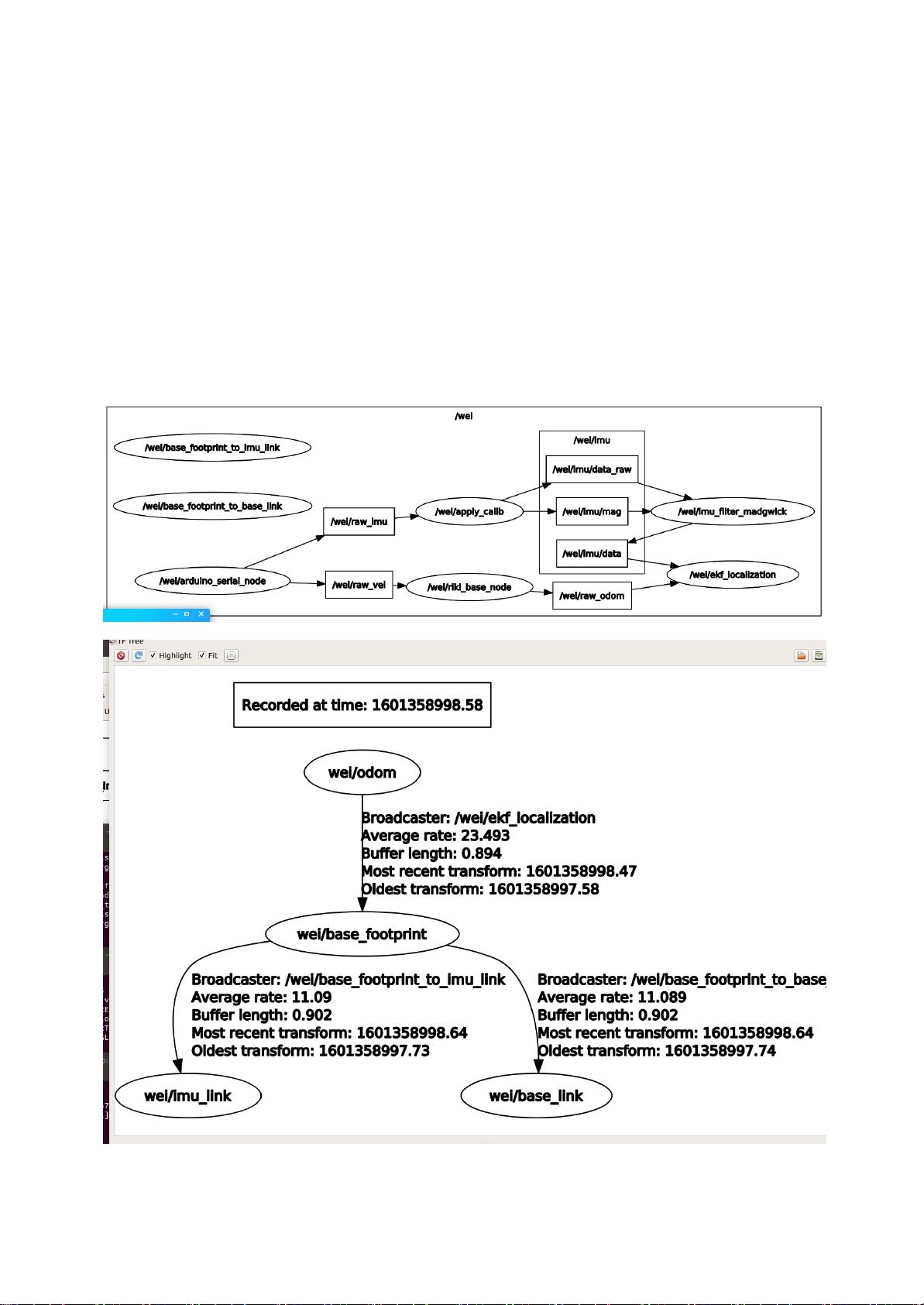
1. **/arduino_serial_node**:这个节点负责从连接的Arduino设备(或类似硬件)的串口读取IMU(惯性测量单元)数据,并将其发布到 `/raw_imu` 和 `/raw_vel` 话题。其中,`/raw_imu` 话题包含角速度、加速度和磁场数据,而 `/raw_vel` 话题则提供线速度和角度值。
2. **apply_calib** 节点:该节点接收 `/raw_imu` 数据,对其进行校准和预处理后,发布到 `/imu/mag` 和 `/imu/data_raw` 话题。这些处理后的数据包含更精确的方向、加速度和角速度等信息。
3. **imu_filter_madgwick** 节点:这是一个滤波器节点,它融合了来自 `/imu/mag` 和 `/imu/data_raw` 的数据,使用Madgwick算法生成更稳定的IMU数据,并发布到 `/imu/data` 话题。
4. **riki_base_node**:这个节点接收 `/raw_vel` 话题的值,通过简单的计算生成一个粗略的里程计,发布到 `/raw_odom` 话题。
5. **ekf_localization** 节点:应用扩展卡尔曼滤波(EKF)算法,结合 `/raw_odom` 的里程计和 `/imu/data` 的IMU数据,产生更准确的里程计,并发布到 `/tf` 话题。此外,它还发布动态的tf转换,从 `base_footprint` 到 `odom`。
6. 静态TF发布节点:发布从 `base_footprint` 到 `base_link` 以及 `base_footprint` 到 `imu_link` 的静态转换。
整体来看,这个系统通过传感器数据融合和滤波算法,为机器人提供了一个可靠的定位和导航基础。
要实现多机器人环境,关键在于为每个机器人的节点添加合适的命名空间。通过在launch文件中使用 `ns` 关键字,我们可以将每个节点的名称空间化,如 `ns="wei"`,以区分不同机器人的相同节点。这样,所有的节点名、话题名和TF框架都会在其各自的命名空间下运行,从而避免了冲突。
例如,对于 `arduino_serial_node`,我们可以在launch文件中这样写:
```xml
<node name="arduino_serial_node" pkg="rosserial_python" type="serial_node.py" output="screen" ns="wei">
```
这样,节点将会运行在 `wei/arduino_serial_node` 的命名空间下,相应的话题也会变成 `wei/raw_imu` 和 `wei/raw_vel`。
在实际操作中,还需要确保所有的tf转换和消息订阅发布也要正确地反映出命名空间的改变。这对于构建正确的tf树和确保节点间通信的正确性至关重要。在多机器人环境中,每个机器人的tf树应该独立,且与其它机器人的tf树互不干扰。
通过这样的方式,我们可以成功地将一个单机程序修改为支持多机环境,为实现多机器人协同工作奠定了基础。
### 整体功能介绍
主要是接收编码器和imu的数据并通过ekf进行融合获得一个良好的里程计。
同时建立机器人基本的tf树。
## 为bringup添加namespace
这一步是多机建图的基础。
### 运行效果
节点图:
从外表上看,无非是所有节点、tf树添加了命名空间,但实际上,这其中有很多的问题。
一个节点一个节点地说明。
剩余10页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-03-14 上传
2023-11-22 上传
2024-11-27 上传
2023-05-29 上传
2023-05-24 上传

USTC看门老大爷
- 粉丝: 20
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







