GCR系列协作机器人操作与编程指南
需积分: 5 107 浏览量
更新于2024-06-30
收藏 4.47MB PDF 举报
"新松协作机器人操作说明"
新松协作机器人是一款专为工业自动化设计的智能设备,主要由GCR系列的GCR20-1100和GCR14-1400型号组成。这款机器人具备友好的用户界面和高效的操作系统,旨在简化编程和后期维护工作。用户手册详细阐述了软件部分的功能,涵盖了从基本操作到高级编程的方方面面。
手册首先对读者对象进行了定位,包括但不限于机器人操作员、程序员和维护技术人员。在符号约定部分,它可能定义了用于指示重要信息、警告和注意事项的特定图形和文字标记,以便用户能快速识别关键内容。
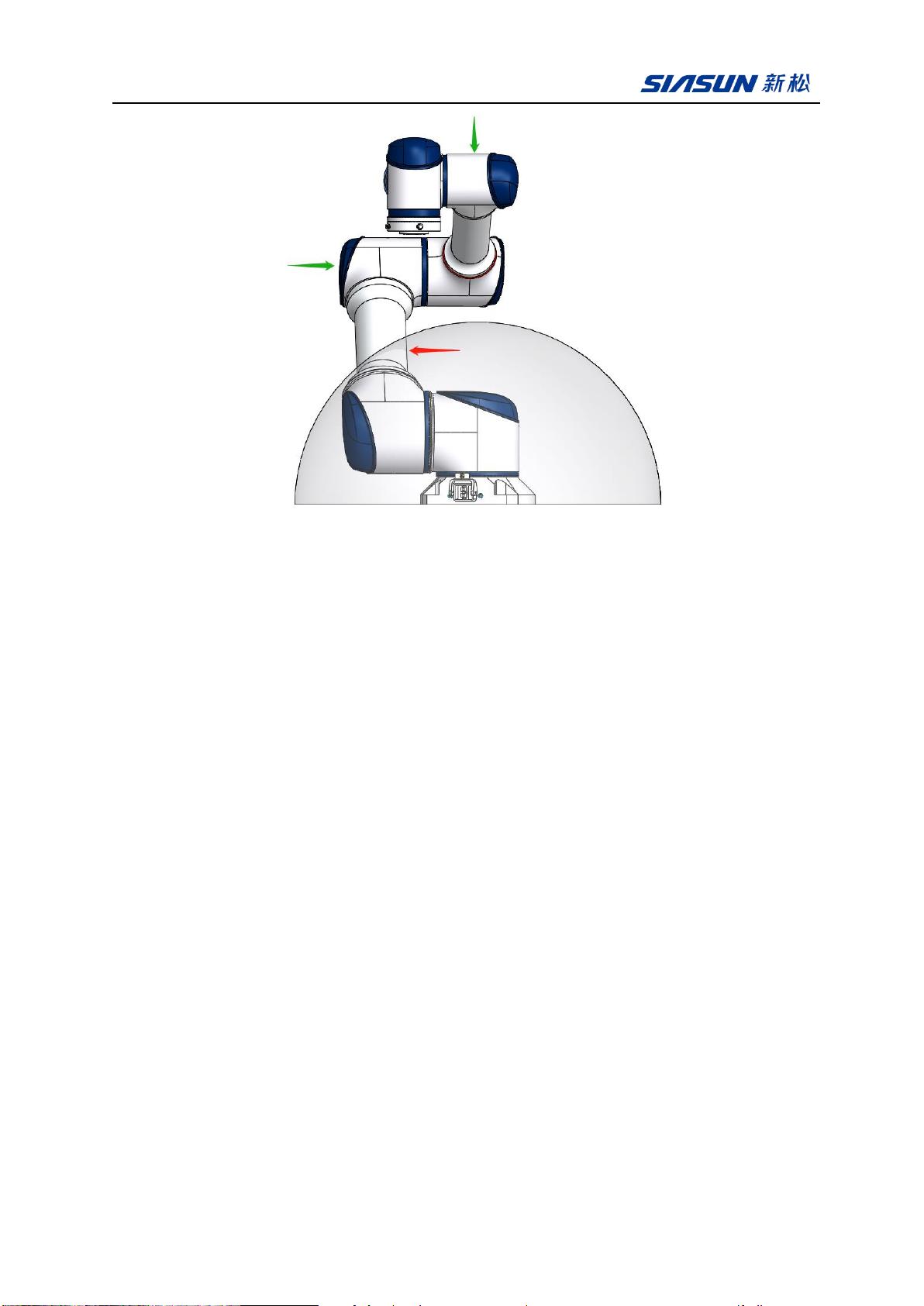
安全是新松协作机器人操作的核心,手册专门列出了一章来强调这一主题。安全章节包含了概述、有效范围与责任说明、风险评估以及安全操作指南。例如,紧急停机和无电力驱动的移动都是重要的安全操作步骤,确保在必要时能够迅速响应并避免潜在危险。此外,手册还介绍了机器人的一些安全功能,如停机类别和安全停止机制,以防止意外伤害。
在功能介绍部分,用户可以学习如何打开和关闭电源,以及熟悉不同界面的功能,如移动界面用于控制机器人的运动,编程界面用于编写和编辑机器人程序,运行界面则用于监控机器人的实时运行状态。状态界面显示机器人的当前工作状态,而设置界面允许用户根据需求调整各种参数。关于界面提供了软件和硬件的相关版本信息,断开界面则用于结束操作并退出系统。
对于编程部分,手册详细讲解了如何创建程序,并提供了一系列的编程标签,如MOVE标签,用于定义机器人的移动路径,而FUNCTIONS标签则可能包含一系列预设的函数,帮助用户更高效地编写和执行任务。
新松协作机器人的操作手册是一份全面的指南,它不仅教导用户如何安全有效地操作机器人,还提供了详细的编程知识,使用户能够充分利用这款机器人的能力,实现灵活、高效的自动化生产。通过遵循手册的指导,用户能够减少错误,提高生产效率,并确保设备的长期稳定运行。




202 浏览量
1310 浏览量
614 浏览量
2021-08-14 上传
1310 浏览量
107 浏览量
819 浏览量
819 浏览量
2022-11-03 上传









