移动机器人红外感测系统设计与应用
需积分: 9 119 浏览量
更新于2024-09-20
收藏 385KB PDF 举报
"移动机器人红外感测系统研制"
本文主要探讨了如何利用红外传感器技术来开发一个适用于移动机器人的感测系统。移动机器人在现代自动化和智能环境中的应用日益广泛,而有效的感知能力是其成功执行任务的关键。红外传感器因其非接触性、响应速度快、成本相对较低等优点,在机器人领域中被广泛应用。
首先,文章介绍了基于分立反射式红外传感器的测距系统。这种系统通过发射红外光束,当遇到障碍物时,红外光会被反射回来,根据接收到的信号时间和强度,可以计算出机器人与障碍物之间的距离。分立式传感器通常由发射器和接收器两部分组成,它们能够精确检测到近处的物体,对于移动机器人的避障功能至关重要。
其次,一体反射式红外传感器被用于构建自动引导系统。这种传感器结合了发射和接收的功能,可以连续监测机器人行进路径上的环境变化,确保机器人按照预设路线行驶或根据环境反馈进行动态调整。它能有效应对光线变化和颜色差异,提供稳定可靠的导航信息。
再者,文章还提到了热释电红外传感器在跟踪系统中的应用。热释电传感器能够探测到人体或其他热源发出的红外辐射,从而实现对人或其他热目标的追踪。这对于服务机器人或互动型机器人来说,能够使其具备跟随用户或识别活动区域的能力。
在系统设计中,作者不仅完成了硬件平台的构建,包括传感器的选择、信号处理电路的设计以及数据采集模块的搭建,还实现了软件层面的控制算法和数据处理程序。这些软件部分包括信号滤波、距离计算、目标识别等功能,确保了系统的高效运行和准确感知。
通过理论分析和实验验证,作者证明了所设计的红外感测系统具有简洁的结构、高精度、高可靠性和低成本的特点。实验结果显示,该系统在实际的移动机器人避障导航任务中表现出色,能够有效地帮助机器人避开障碍,实现安全、稳定的自主移动。
移动机器人红外感测系统的研究为机器人技术的进步提供了新的思路和方法,其应用范围涵盖了从工业自动化到家庭服务的各种场景,具有很高的实用价值和研究意义。未来,随着传感器技术的进一步发展,类似的感测系统有望在更多复杂环境中发挥更大的作用。
匿画墅雯霾亟亟豆因
机器人技术
文章编号:1008-0570(2009)07—2—0191—03
移动机器人红外感测系统研制
Sense—-measurement
System
Design
for
Mobile
Robot
Using
Infrared
Sensor
(南通大学)吴晓华亮李智
WU
Xiao
HUA
Liang
LI
Z.hi
摘要:文章充分利用红外传感器的优点.研制了基于红外传感器的移动机器人感测系统。该感测系统由基于分立反射式红外
传感器的测距系统、基于一体反射式红外传感器的引导系统、基于热释电红外传感器的跟踪系统组成。文章完成了感测系
统软硬件设计,并进行了详细的理论和实验研究。实验结果表明文章设计的系统结构简单、精度高、可靠性高、成本低,具有
普遍的应用意义和广泛的应用价值.该感测系统在移动机器人避障导航中得到了良好的应用。
关键词:移动机器人;反射式红外传感器:红外热释电传感器
中图分类号:TP383
文献标识码:B
Abstract:The
paper
puts
forward
a
sense—measurement
design
method
for
mobile
robot
using
infrared
sensor.The
sense-measurement
system
is
composed
of
distance
measurement
system
using
discrete
infrared
sensor.automatic
guidance
system
using
integrative
lnfrared
sensor
and
human
tracking
system
using
pyroelectric
infrared
sensor.The
software
and
hardware
platforms
of
sense—measurement
sys-
tem
are
designed
and
the
theoretical
and
experimental
studies
are
completed.The
sense—measurement
system
designed
in this
paper
ls
of
explicit
structure,high
precision,high
reliability,low
cost
and
it
has
broad
prospect
in
applicaction.The
sense—measurement
system
designs
jn
the
paper
provides
the
high
precision
control
to
the
obstacle
avoidance
system
for
mobile
robot
successfully.
Key
words:mobile
robot;reflection
infrared辩nsor;pyroelectric
infrared辩osor
1引言
作为先进科学技术的重要组成部分.红外技术在智能机器
人避障导航领域得到了广泛的应用。由于基于图像的理解技术
还很落后.基于图像处理的机器视觉需通过大量的运算.只能
识别一些结构化环境简单的日标.并且在价格及处理复杂程度
上不占优势。因此红外感测控制系统可作为机器人的一种简单
视觉。为机器人运动过程中位置的准确性提供保障。
2基于反射式红外传感器的测距系
统研制
2.1红外测距方法
文章采用频分制的控制方式。由于只用一对红外传感器,
只需采用固定频率发射.选频接收.可有效抑制环境干扰。文章
对红外发射二极管采用脉动直流电流驱动方式。由于发射具有
特定频率的脉动红外光.因此环境光线干扰均在接收选频电路
中被滤除。红外光的有效传输距离正比于驱动峰值功率,而峰
值功率又与所加驱动峰值电流成正比。因此调节驱动电流可以
调节检测距离。由于受到发光二极管响应时间限制,脉冲电流
上平顶跨度不能太窄。文章采用38.91KHZ的发射频率。
2.2红外测距系统没计
文章采用杭州科纳传感器有限公司的红外发射管TLNl03
和接受管PT370。发射管发射距离最远为lm,发射角度为+80。,
发射功率80roW。正向电流60mA。红外接收管接收角度为±45。
将红外接收管四周用黑色绝缘胶带封住,使接收管只能接收前
方的反射信号。改变发射功率来改变可测距离。文章采用文献
的设计方案.运用集成锁相环路解码器LM567实现发射和选频
接收.锁相环路输出信号由压控振荡器产生,其自由振荡频率
与外接定时元件瑚匀关系式为:
.磊=I/1.1足凿检测到的信号
中有接近LM567设定的频率且有一定幅值的回波时,8脚由高
电平变为低电平。
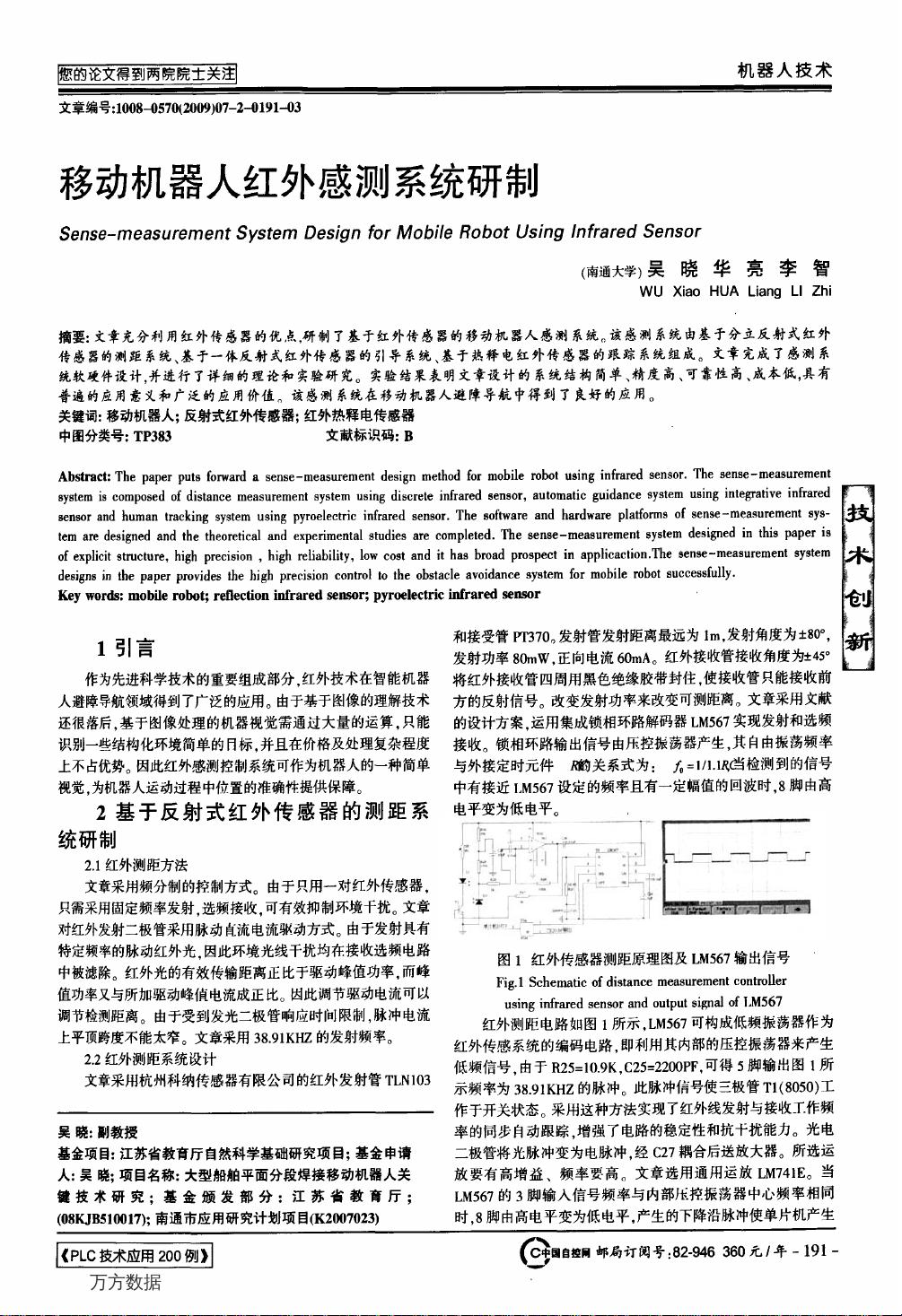
图1红外传感器测距原理图及LM567输出信号
Fig.1
Schematic
of
distance
measurement
controller
using
infrared
sensor
and
output
signal
of
LM567
红外测距电路如图1所示。LM567可构成低频振荡器作为
红外传感系统的编码电路,即利用其内部的压控振荡器来产生
低频信号.dt于R25:10.9K,C25=2200PF,可得5脚输出图l所
示频率为38.91KHZ的脉冲。此脉冲信号使三极管T1(8050)工
作于开关状态。采用这种方法实现了红外线发射与接收工作频
吴晓:副教授
率的同步自动跟踪.增强了电路的稳定性和抗十扰能力。光电
基金项目:江苏省教育厅自然科学基础研究项目:基金申请
二极管将光脉冲变为电脉冲.经C27耦合后送放大器。所选运
人:吴晓:项目名称:大型船舶平面分段焊接移动机器人关
放要有高增益、频率要高。文章选用通用运放LM741E。当
键技术研究:基金颁发部分:江苏省教育厅;LM567的3脚输入信号频率与内部压控振荡器中心频率相同
(08KJB510017);南通市应用研究计划项[](K2007023)
时。8脚由高电平变为低电平,产生的下降沿脉冲使单片机产生
r———————.————.———.———————————————.,
,’o\
I(PLC技术应用200例>I
‘c圣国喜控同邮局订阅号:82—946
360元,年一191—
万方数据
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
198 浏览量

frank19861126
- 粉丝: 0
- 资源: 14
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
