激光SLAM系统解析:Gmapping、Cartographer与LOAM算法
需积分: 5 150 浏览量
更新于2024-06-21
收藏 2.58MB PPTX 举报
“第8章 激光SLAM系统.pptx”主要涵盖了激光SLAM(Simultaneous Localization And Mapping,同时定位与建图)的相关内容,包括Gmapping、Cartographer和LOAM三种主流的激光SLAM算法。该资源旨在为读者提供从编程基础、硬件基础到SLAM理论及实践的全面知识,最终应用于自主导航。
激光SLAM是机器人学中的关键技术,它允许机器人在未知环境中实时构建地图并自我定位。以下是这三种算法的详细介绍:
1. Gmapping算法:
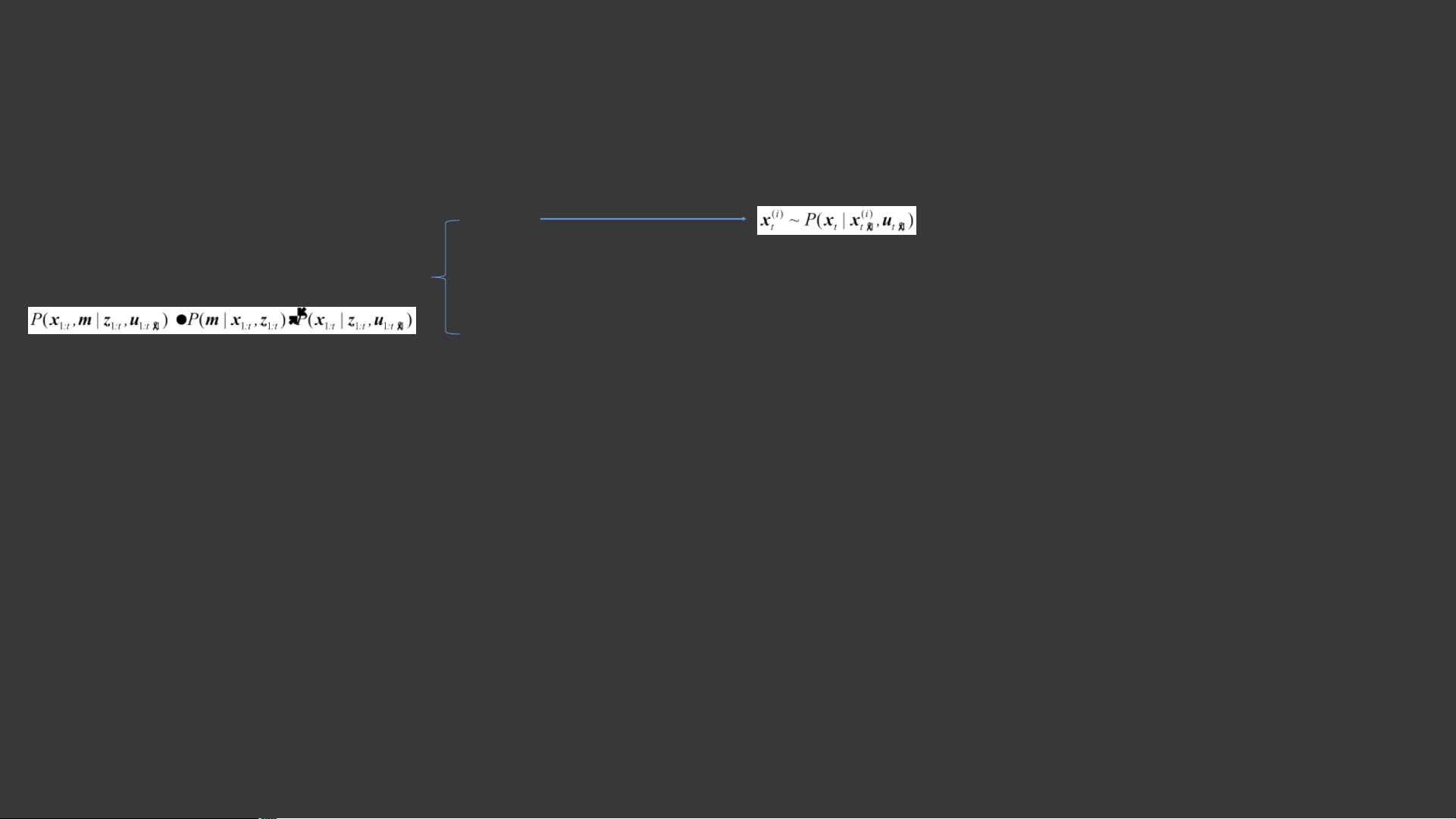
Gmapping是基于粒子滤波(Particle Filter)的SLAM解决方案,特别是采用了Rao-Blackwellized Particle Filter(RBPF)。它的核心思想是将SLAM问题分解为两个子问题:首先解决定位问题,然后解决建图问题。在Gmapping中,通过采样、重要性权重计算和重采样步骤来更新粒子的分布,从而估计机器人位置和地图。Gmapping的源码可以在ROS的官方仓库中找到,提供了详细的实现流程。安装Gmapping可以通过在ROS Melodic环境下执行特定的命令完成。
2. Cartographer算法:
Cartographer是Google开发的一个高效、实时的SLAM系统,设计用于处理大型室内和室外环境的数据。它采用了一种连续时间的状态估计方法,利用了滑窗优化来减少计算量,确保了在处理大规模数据时的性能。Cartographer不仅支持激光雷达,还支持IMU和其他传感器数据,实现了多传感器融合。
3. LOAM(Lidar Odometry and Mapping)算法:
LOAM专注于激光雷达数据的高精度里程计和地图构建。它分为两个主要阶段:高频率的粗略估计和低频率的精细匹配。粗略估计阶段通过特征匹配快速计算相对位姿,而精细匹配阶段则进行特征点的精确匹配,以提高全局一致性。LOAM的优点在于其对动态物体的鲁棒性和对环境变化的适应性。
这些算法各有优缺点,适用于不同的场景和需求。例如,Gmapping适合于中等规模环境且传感器数据质量较高的情况,而Cartographer则更侧重于实时性和大规模环境的处理,LOAM则在复杂环境和动态物体存在时表现出色。
在学习这些算法的同时,还需要理解SLAM的基本数学基础,如概率滤波理论、几何变换和卡尔曼滤波等。此外,了解ROS(Robot Operating System)的使用、C++编程和OpenCV图像处理等基础知识也是至关重要的。对于实际应用,还需要掌握如何在自主导航系统中集成SLAM,以及如何解决定位漂移、环路闭合和全局优化等问题。通过本章的学习,读者可以建立起对激光SLAM系统的深入理解,并有能力实现自己的SLAM解决方案。
8.1 Gmapping算法
4/24
Gmapping原理分析
第8章 激光SLAM系统
①RBPF的滤波过程
采样
重要性权重
重采样
地图估计
RBPF:Rao-Blackwellization Particle Filter
先求定位问题,再求建图问题
②RBPF的建议分布改进
③RBPF的重采样改进
* 关于改进RBPF算法伪代码,请看课本中的代码清单8-1
剩余22页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-09-03 上传
2022-07-15 上传
2024-06-22 上传
2022-01-17 上传

xiaoli8748_软件开发
- 粉丝: 1w+
- 资源: 1435
 我的内容管理
展开
我的内容管理
展开







最新资源
- CtfGit:Pagina Del Curso de Programacion
- 340-project-3
- 资产服务器2
- Accuinsight-1.0.34-py2.py3-none-any.whl.zip
- Motion-Detector-with-OpenCV:Python OpenCV项目
- ProcessX:使用C#8.0中的异步流来简化对外部进程的调用
- BELabCodes:这些是我在 BE 期间作为实验室实验编写的代码集合
- screwdriver:Dart包,旨在提供有用的扩展和辅助功能,以简化和加速开发
- cliffordlab.github.io:实验室网站
- 每日报告
- Meter:与MetricKit进行交互的库
- nova-api:新资料库
- marketplace_stat:虚幻市场统计可视化工具
- Blanchard__课程
- 2P_cellAttached_pipeline:2P单元贴记录管道
- kalkulator
