激光SLAM系统Hector:全运动估计的灵活与可扩展解决方案
需积分: 0 68 浏览量
更新于2024-08-05
2
收藏 6.04MB PDF 举报
本文档标题为"激光SLAM Hector:一种灵活且可扩展的全运动估计SLAM系统",作者为Stefan Kohlbrecher和Oskar von Stryk,来自德国达姆施塔特工业大学。该研究专注于在城市搜救(Urban Search and Rescue, USAR)等场景中,开发一种高效、资源节约的在线地图构建系统——激光SLAM Hector。SLAM(Simultaneous Localization and Mapping)技术是机器人导航的关键组成部分,它需要机器人在未知环境中实时定位和构建环境地图。
核心内容包括:
1. 3D运动估计:系统利用了激光雷达(LIDAR)进行扫描匹配,这是一种强大的传感器,能提供丰富的环境信息,帮助机器人在三维空间中精确感知周围环境。通过3D姿态估计算法,结合惯性测量单元(IMU)的数据,实现了机器人在动态环境中的稳定定位。
2. 地图梯度快速近似:为了提高处理效率,文章提出了一种有效的方法来估计地图的局部梯度,这有助于简化SLAM过程,减少计算负担,尤其是在复杂或变化多端的环境中。
3. 多分辨率网格:通过采用多分辨率网格结构,SLAM Hector能够适应不同尺度的空间需求,无论是精细的室内环境还是粗糙的室外地形,都能保证准确性和稳定性。
4. 低资源消耗:系统的主要目标是实现快速且实时的学习,这意味着它在有限的计算资源下仍能提供可靠的本地化和建图能力,避免了对昂贵的循环闭合技术的依赖。
5. 实际应用验证:论文提供了多个数据集,展示了SLAM Hector在嵌入式手持测图系统中的实际应用效果,证明了其在各种挑战性环境中的适用性和高精度。
这篇论文介绍了一种在USAR等应用领域具有显著优势的SLAM系统,其通过优化的算法和技术,能够在资源受限的条件下实现高效的地图构建,为无人自主导航提供了强大的支持。同时,通过实证数据展示了其在无需额外循环闭合技术的情况下也能保持足够的准确性。这对于未来智能机器人和无人机的发展具有重要意义。
A Flexible and Scalable SLAM System with Full
3D Motion Estimation
Stefan Kohlbrecher and Oskar von Stryk
Technische Universit
¨
at Darmstadt
Hochschulstraße 10
Darmstadt, Germany
kohlbrecher,stryk@sim.tu-darmstadt.de
Johannes Meyer and Uwe Klingauf
Technische Universit
¨
at Darmstadt
Petersenstraße 30
Darmstadt, Germany
meyer,klingauf@fsr.tu-darmstadt.de
Abstract—For many applications in Urban Search and Rescue
(USAR) scenarios robots need to learn a map of unknown
environments. We present a system for fast online learning of
occupancy grid maps requiring low computational resources.
It combines a robust scan matching approach using a LIDAR
system with a 3D attitude estimation system based on inertial
sensing. By using a fast approximation of map gradients and
a multi-resolution grid, reliable localization and mapping ca-
pabilities in a variety of challenging environments are realized.
Multiple datasets showing the applicability in an embedded hand-
held mapping system are provided. We show that the system
is sufficiently accurate as to not require explicit loop closing
techniques in the considered scenarios. The software is available
as an open source package for ROS.
Keywords: Simultaneous Localization and Mapping, Inertial
Navigation, Robust and Fast Localization
I. INTRODUCTION
The ability to learn a model of the environment and to
localize itself is one of the most important abilities of truly
autonomous robots able to operate within real world envi-
ronments. In this paper, we present a flexible and scalable
system for solving the SLAM (Simultaneous Localization
and Mapping) problem that has successfully been used on
unmanned ground vehicles (UGV), unmanned surface vehicles
(USV) and a small indoor navigation system. The approach
consumes low computational resources and thus can be used
on low-weight, low-power and low-cost processors such as
those commonly used on small-scale autonomous systems.
Our approach uses the ROS meta operating system [1] as
middleware and is available as open source software. It honors
the API of the the ROS navigation stack and thus can easily
be interchanged with other SLAM approaches available in the
ROS ecosystem.
The system introduced in this paper aims at enabling suffi-
ciently accurate environment perception and self-localization
while keeping computational requirements low. It can be used
for SLAM in small scale scenarios where large loops do
not have to be closed and where leveraging the high update
rate of modern LIDAR systems is beneficial. Such scenarios
include the RoboCup Rescue competition, where robots have
SLAM subsystem (2D)
LIDAR
Preprocessing Scan Matching Mapping
Navigation subsystem (3D)
IMU GPS Compass
Navigation Filter
Altimeter
...
Controller
2D Pose Estimate Attitude and Initial Pose
Stabilization
Joint Values
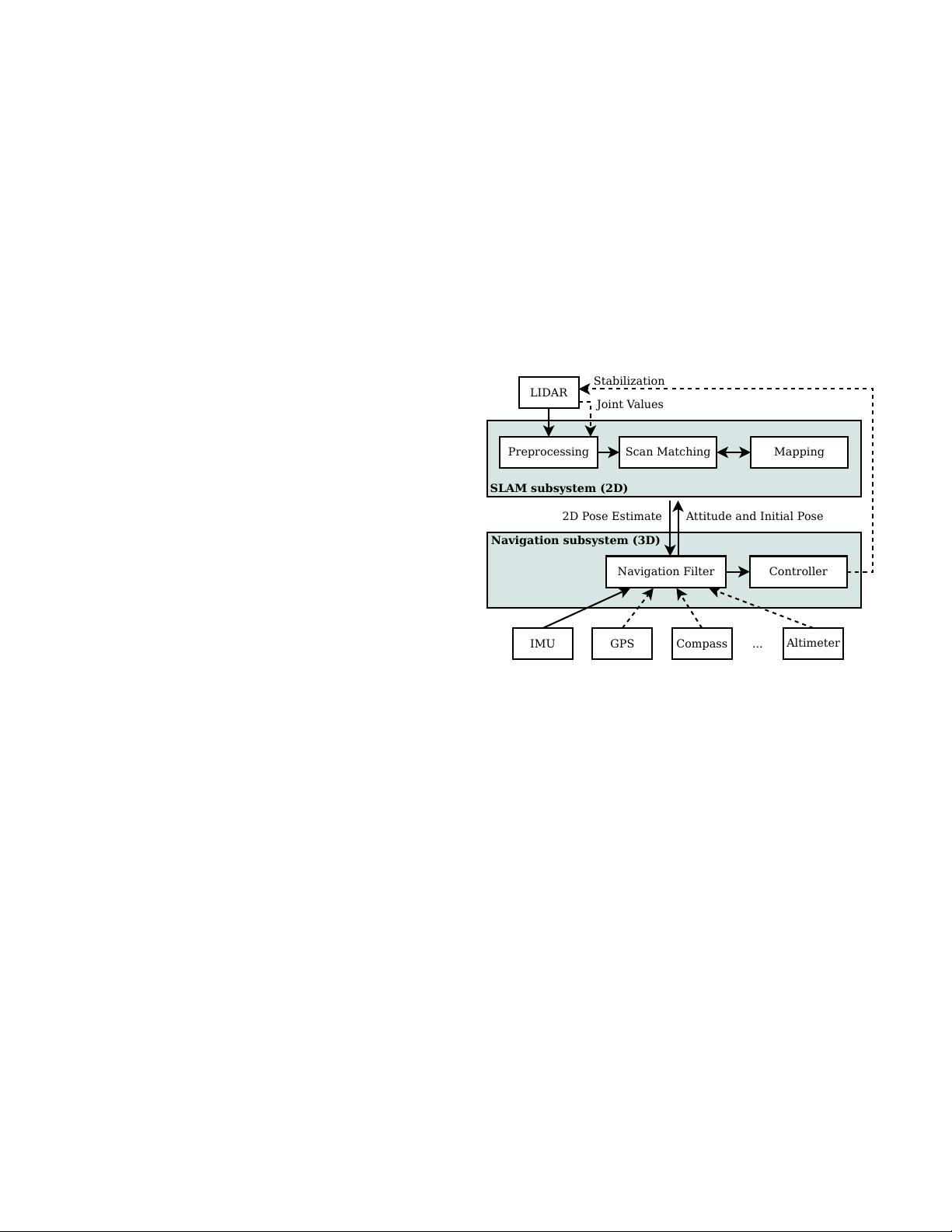
Fig. 1. Overview of the mapping and navigation system (dashed lines depict
optional information)
to find victims in simulated earthquake scenarios which feature
rough terrain and thus require full 6DOF motion estimation of
vehicles, or the indoor navigation of agile aerial vehicles that
move fast compared to ground robots. Previous results where
the system has been used in the context of building semantic
world models in USAR environments are available in [2].
Our approach combines a 2D SLAM system based on the
integration of laser scans (LIDAR) in a planar map and an
integrated 3D navigation system based on an inertial mea-
surement unit (IMU), which incorporates the 2D information
from the SLAM subsystem as one possible source of aiding
information (Fig. I). While SLAM usually runs in soft real-
time triggered by the updates of the laser scanner device, the
full 3D navigation solution is calculated in hard real-time and
usually forms a part of the vehicle control system.
II. RELATED WORK
There has been a wealth of research into the SLAM problem
in recent years, with reliably working solutions for typical
office-like indoor scenarios using Rao-Blackwellized particle
c
2011 IEEE
下载后可阅读完整内容,剩余5页未读,立即下载
2022-08-04 上传
2022-08-04 上传
2022-08-04 上传
2022-03-18 上传
2020-10-25 上传
2015-10-17 上传
2017-03-15 上传
2020-11-03 上传

老许的花开
- 粉丝: 33
- 资源: 328
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
