FANUC机器人与PLC/焊机的PROFIBUS-DP&DEVICENET通讯配置指南
版权申诉
99 浏览量
更新于2024-06-26
收藏 4.95MB PDF 举报
"该文档详细介绍了FANUC机器人与SIEMENS PLC以及FRONIUS焊机之间的通讯配置,主要涉及PROFIBUS-DP和DEVICENET两种通讯协议。"
在工业自动化领域,FANUC机器人与外部设备的通信是实现高效生产的关键环节。这篇文档详述了FANUC机器人如何与SIEMENS S7-300 CPU317-2PN/DP PLC通过PROFIBUS-DP进行通讯,以及与FRONIUS焊机通过DEVICENET进行通讯的过程。
1. FANUC机器人与SIEMENS PLC的PROFIBUS-DP通讯:
- 硬件准备:使用PLC作为主站,FANUC机器人作为从站,两者通过DP线连接。FANUC机器人需配备支持PROFIBUS-DP的通讯板卡。
- 软件设置:在PLC端,需要组态主站系统,分配站号和I/O地址;在机器人示教盒中,设置站地址、波特率以及I/O分配。特别注意,站地址和波特率必须保持一致,且在未进行通讯前,为确保机器人正常运行,需启用“单次报错”功能。
2. FANUC机器人与FRONIUS焊机的DEVICENET通讯:
文档中虽然没有详细介绍这部分内容,但可以推测,类似PROFIBUS-DP的配置,需要在FANUC机器人和FRONIUS焊机上分别进行DEVICENET的相关设置,包括站地址、I/O地址分配以及波特率等,以确保数据能正确交换。
这两种通讯协议都是工业自动化中常用的现场总线标准,PROFIBUS-DP适用于高速、实时的数据交换,常用于PLC与分布式I/O设备之间的通信;而DEVICENET则是一种开放的、低成本的网络,适合连接各种设备,如传感器、执行器和控制器。
通过这些通讯设置,FANUC机器人可以接收来自PLC的指令,执行相应的动作,同时将自身的状态信息反馈给PLC,实现自动化生产线的协调运作。对于FRONIUS焊机,可能涉及到焊接参数的设置和焊接状态的监控,进一步提升生产效率和质量。
理解和掌握这些通讯配置对于维护和优化工业自动化系统至关重要,因为它们是确保设备间无缝协作的基础。
. . . . .
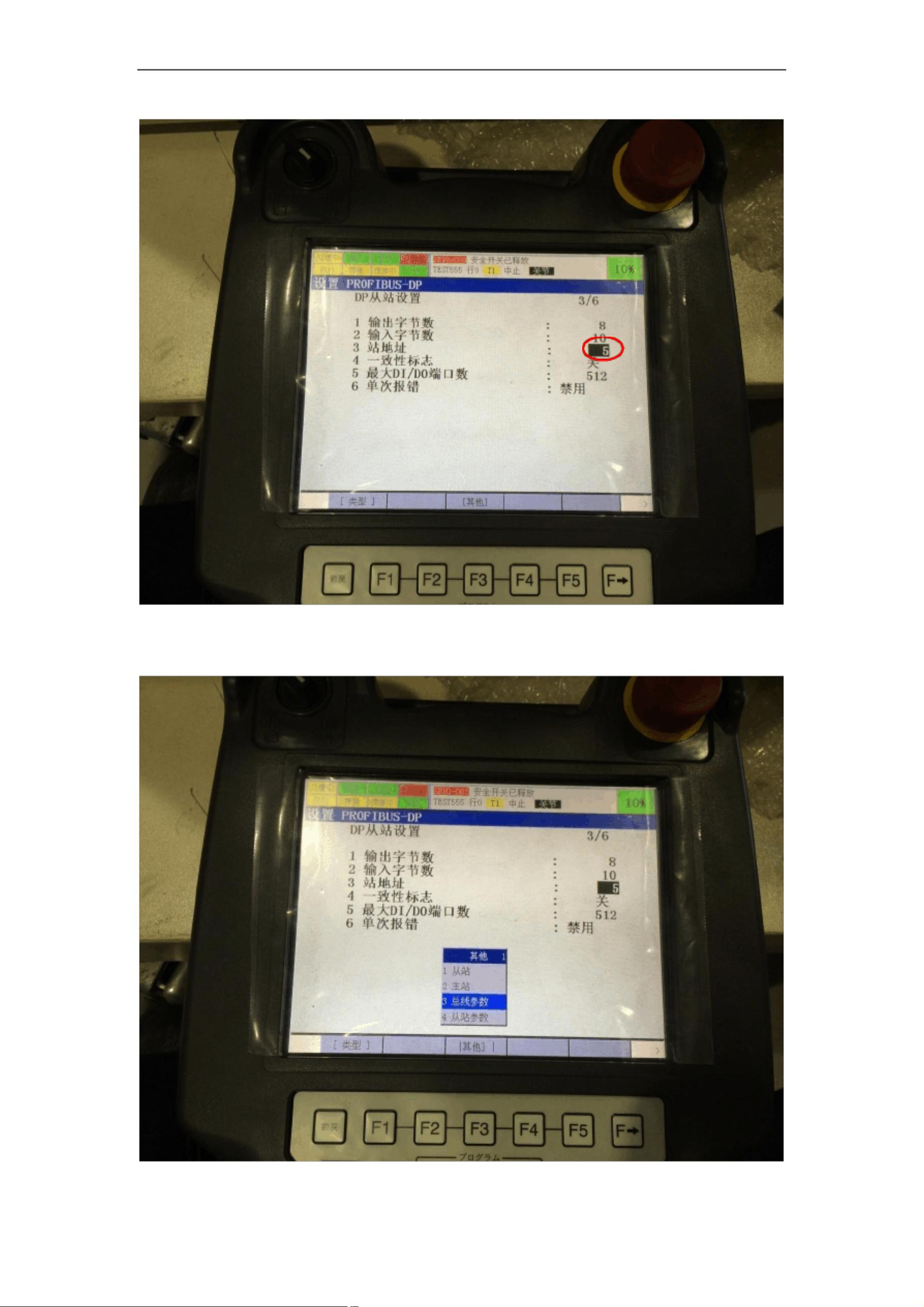
将 3 站地址设置成与 PLC 组态时的地址一致,并将 6 单次报错设为禁用。
注:在未进展 DP 通讯前,假设要使机器人动作,6 单次报错应设为启用。
b)波特率设置
按下 F3 进入[其他]-选择总站参数
3 / 15
剩余14页未读,继续阅读
2022-07-11 上传
2022-06-16 上传
2022-07-03 上传
2021-09-11 上传
2022-07-10 上传
2021-04-27 上传
2019-07-19 上传
2019-09-17 上传
2021-01-01 上传

hhappy0123456789
- 粉丝: 71
- 资源: 5万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
