全国大学生智能汽车竞赛:直立行走控制详解
需积分: 34 119 浏览量
更新于2024-07-20
2
收藏 6.12MB PDF 举报
本篇文章详细解析了陀螺仪加速度计在自平衡小车(电磁组直立行车)中的应用,旨在提升全国大学生智能汽车竞赛的创新性和趣味性。竞赛规则要求车模模仿两轮自平衡电动车的直立行走模式,通过双后轮驱动实现稳定行驶。文章分为六个部分:
1. 前言部分介绍了比赛背景和目标,强调了直立行走对车模控制算法、车体检测和能耗等方面的高要求,并提到了该参考设计方案的编写目的,即帮助参赛者快速理解和制作车模。
2. **原理篇**:
- **直立行走任务分解**:详细阐述了如何将直立行走任务分解为车模的直立控制、速度控制和方向控制。
- **车模直立控制**:涉及如何通过陀螺仪和加速度计等传感器来检测和调整车模的姿态。
- **速度控制**:介绍如何根据速度传感器的数据调整电机驱动,保持稳定的移动速度。
- **方向控制**:讲解了利用方向传感器或PID控制策略来实现车模的转向。
- **倾角测量**:陀螺仪和加速度计在测量车模倾斜角度中的关键作用。
- **总图**:给出了整个控制系统的逻辑框架。
3. **电路设计篇**:
- **整体电路框图**:展示了电路的整体结构,包括各模块的连接和功能。
- **DSC与单片机**:介绍了微控制器单元DSC在控制系统中的作用以及其最小系统配置。
- **倾角传感器电路**:详细设计了用于测量车模倾角的传感器电路。
- **电机驱动电路**:确保电机按照控制信号正确运转。
- **速度传感器**:选择并描述了用于检测车速的传感器。
- **电磁线检测电路**:可能涉及到用于检测电磁场变化的电路,用于辅助行驶路径的判断。
4. **机械设计篇**:
- **车模简化改装**:指出了如何从标准C型车模进行必要的硬件改造以适应直立行走。
- **传感器安装**:说明了各个传感器在车模上的具体安装位置和方法。
- **注意事项**:列举了在设计和制作过程中需要注意的关键事项。
5. **软件编写与调试篇**:
- **软件功能与框架**:概述了软件设计的基本架构,包括主要模块和功能。
- **DSC资源配置**:明确了DSC内存储器和I/O口的分配。
- **算法实现**:分享了核心控制算法的实现,如PID控制算法的具体应用。
- **程序调试与参数整定**:讲述了调试步骤和参数优化的重要性。
- **现场测试**:强调了实际比赛环境下的测试与反馈。
6. **结束语**:总结全文,鼓励参赛者根据提供的参考设计进行个性化改进,以提高竞赛表现。
本文不仅提供了理论指导,还结合了实际案例和测试结果,为参赛者提供了一个实用的指南,以便他们在智能汽车竞赛中实现直立行走控制。
9
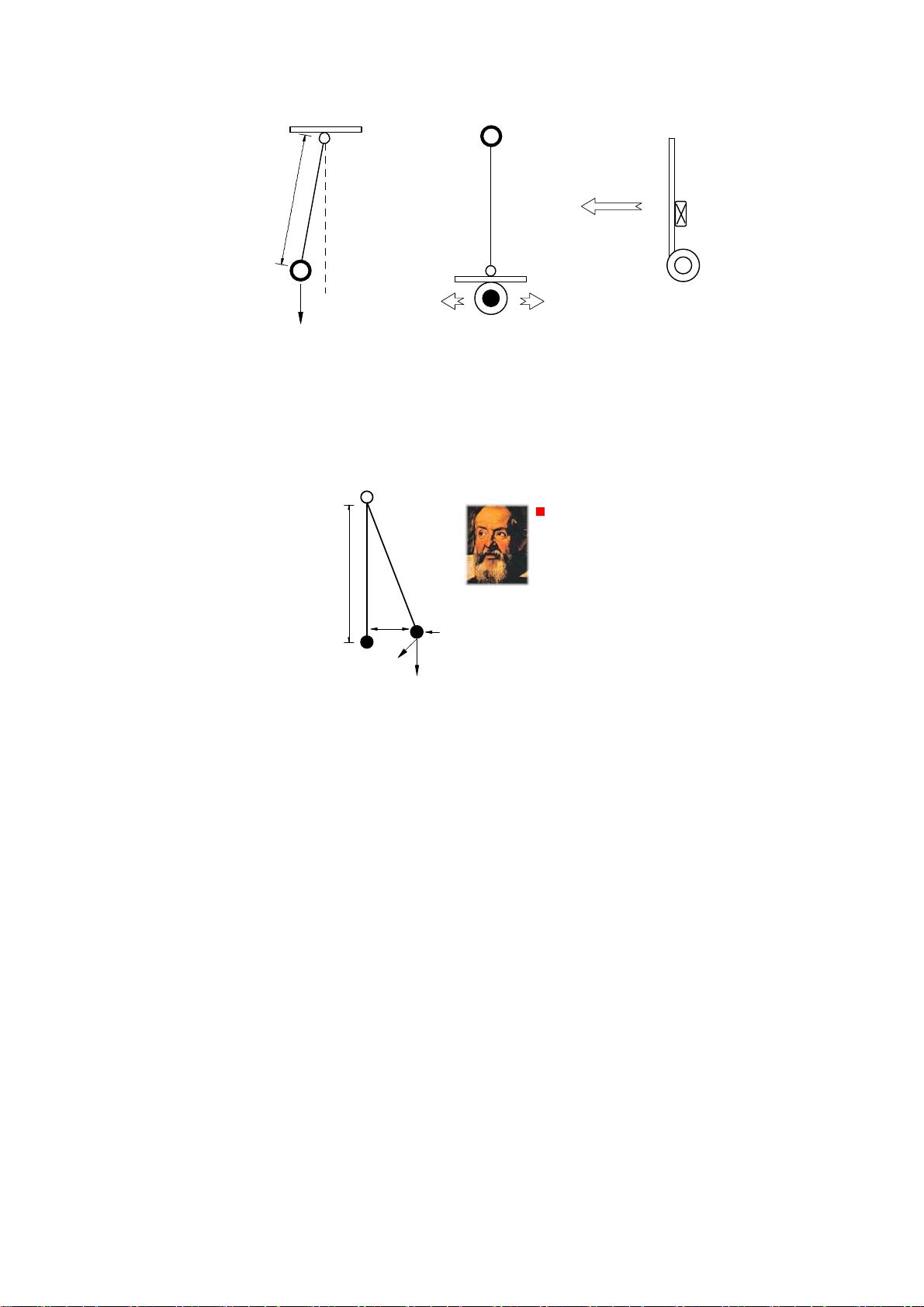
图 2.5 车模可以简化成倒立的单摆
普通的单摆受力分析如图 2.6 所示。
图 2.6 普通的单摆受力分析
当物体离开垂直的平衡位置之后,便会受到重力与悬线的作用合力,驱动重物回复
平衡位置。这个力称之为回复力,其大小为
sinFmg mg
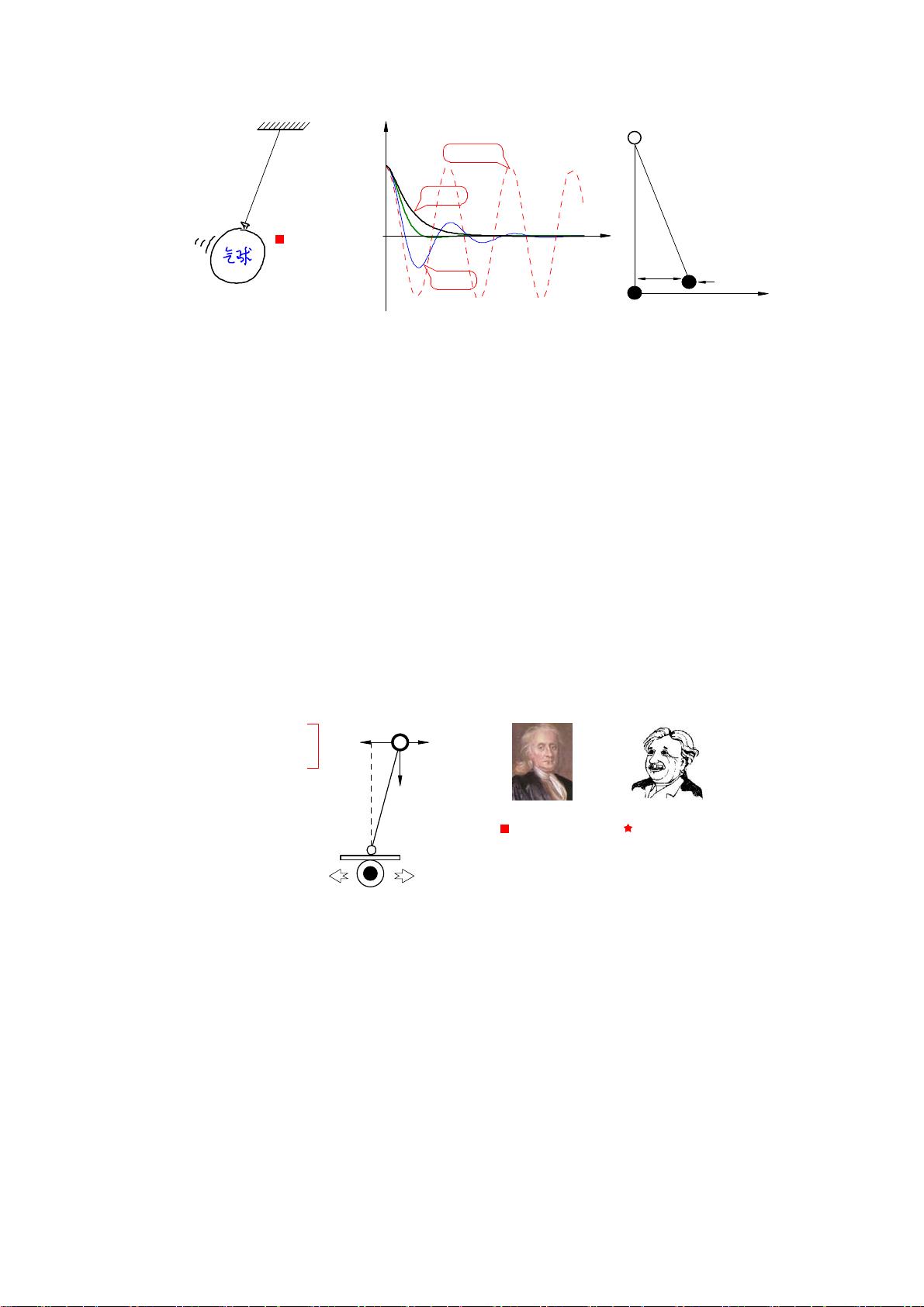
在此回复力作用下,单摆便进行周期运动。在空气中运动的单摆,由于受到空气的
阻尼力,单摆最终会停止在垂直平衡位置。空气的阻尼力与单摆运行速度成正比,方向
相反。阻尼力越大,单摆越会尽快在垂直位置稳定下来。图 2.7 显示出不同阻尼系数下,
单摆的运动曲线。
m
l
mg
θ
a
m
l
车模
简化
底部可以
运动的倒
立单摆
单摆模型
θ
l
sinθ
F=mg
l
质心
m
mgsinθ
伽利略
据说伽利略通
过观察吊灯的
摆动发现了单
摆运动的等时
性。
剩余48页未读,继续阅读
224 浏览量
1167 浏览量
173 浏览量
194 浏览量
2022-09-23 上传
104 浏览量
166 浏览量
137 浏览量
5756 浏览量

5念since
- 粉丝: 194
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- matlab 在环境工程中的应用
- 编程思想E:\编程\C++\参考文档
- Programming Erlang
- GNUMakeManual
- ubuntu安装笔记——part3
- ubuntu安装笔记——part2
- ubuntu安装笔记——part1
- ARM7+基础实验教程.pdf
- EXT 中文手册.doc
- ASP.NET初级入门经典
- C#中调用Windows API时的数据类型对应关系.pdf
- 基于Web的系统测试方法
- pb日历控件源代码.............................................
- ARCGIS/ArcInfo教程基本,地图的配准和屏幕跟踪矢量化
- oracle install guide
- bash programming
