"基于RGB-D相机的SLAM技术研究:服务机器人定位与路径规划"
需积分: 0 119 浏览量
更新于2024-01-03
1
收藏 3.11MB PDF 举报
基于RGB-D相机的SLAM技术研究
随着科技的发展,服务机器人逐渐成为人们生活中重要的一部分。在各个领域中,人们对机器人的要求包括实现机器人的自主定位和路径规划。为了实现这些功能,首先要完成机器人的建图任务。而基于RGB-D相机的同时定位与地图构建(SLAM)技术正是用于实现机器人自主定位和地图构建的一种重要技术。本文在研究的基础上,对基于RGB-D相机的SLAM技术进行了深入的分析和研究。
论文主要分为五个部分:引言、国内外研究综述、基于RGB-D相机的SLAM技术原理、实验与结果分析、总结与展望。
引言部分介绍了服务机器人的发展背景和机器人定位与地图构建的重要性,并简要阐述了基于RGB-D相机的SLAM技术的研究意义和存在的问题。
国内外研究综述部分对基于RGB-D相机的SLAM技术的发展现状进行了综述。首先介绍了SLAM技术的发展历程和关键技术,然后重点分析了目前基于RGB-D相机的SLAM方法的研究进展和存在的问题。通过对国内外相关文献的调研,系统概述了不同方法的优缺点,并对相应的研究成果进行了比较分析。
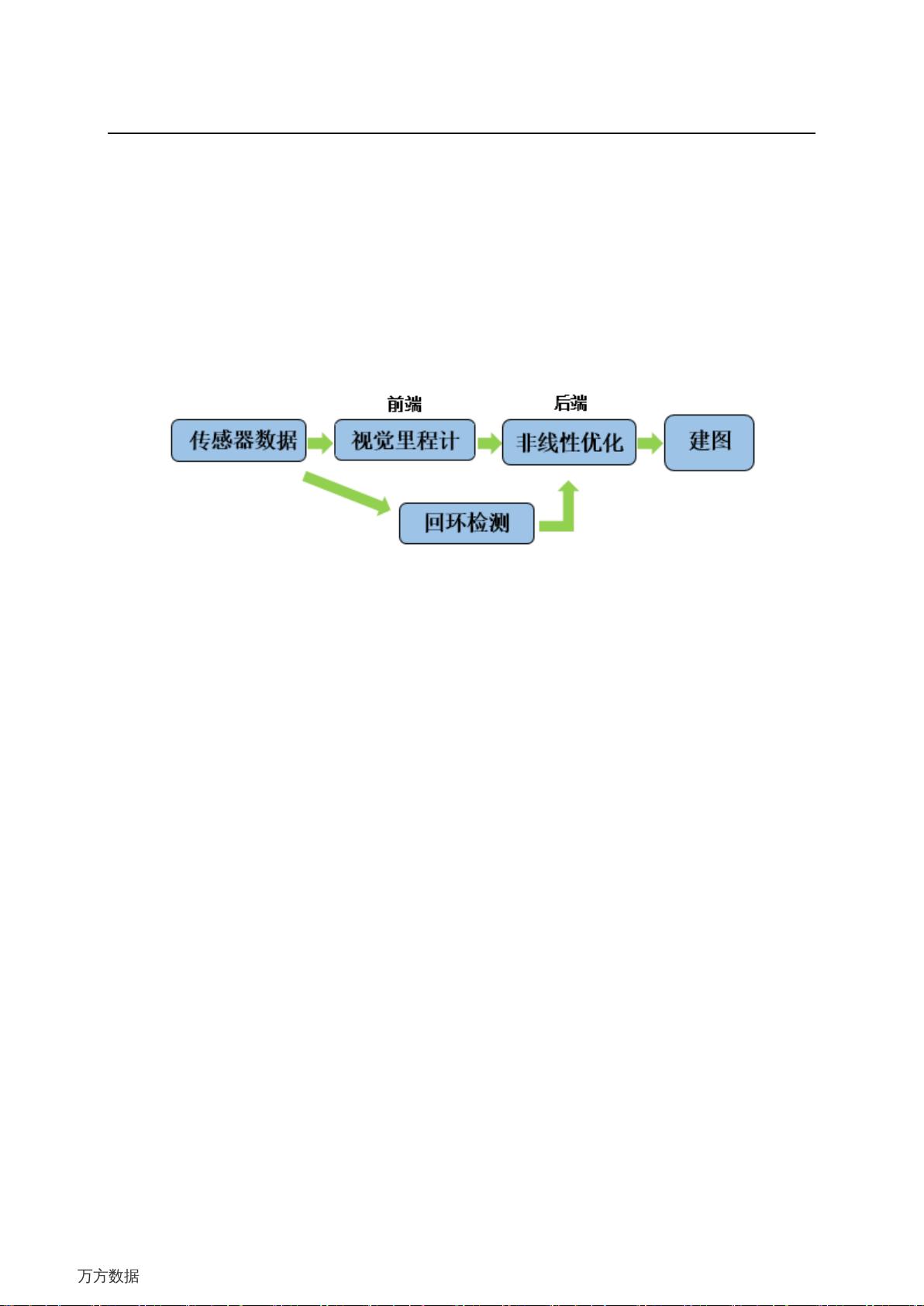
基于RGB-D相机的SLAM技术原理部分详细介绍了基于RGB-D相机的SLAM技术的原理和关键技术。首先介绍了RGB-D相机的特点和工作原理,然后阐述了基于RGB-D相机的定位与地图构建的基本原理和流程,包括特征提取与匹配、姿态估计、地图更新等关键步骤。同时,本文还对常用的基于RGB-D相机的SLAM算法进行了详细介绍和分析。
实验与结果分析部分介绍了本文所设计的实验方案和相关的实验结果。首先介绍了实验平台和所用的数据集,然后详细描述了实验过程和结果。通过对实验数据的分析和对比,验证了基于RGB-D相机的SLAM技术的有效性和实用性。
总结与展望部分总结了本文的研究工作和取得的成果,对基于RGB-D相机的SLAM技术的研究进行了总结,并对未来可能的研究方向和改进方法进行了展望。
通过对基于RGB-D相机的SLAM技术的深入研究,本文对该技术的原理和方法进行了全面的分析和评估。研究结果表明,基于RGB-D相机的SLAM技术具有较高的定位和地图构建精度,并且能够适应不同的环境和场景。然而,目前仍存在一些问题和挑战,例如传感器的精度限制、运动模型的建模等。因此,未来的研究方向应该集中在提高算法的实时性和稳定性、优化地图更新和管理等方面。
总之,本文通过对基于RGB-D相机的SLAM技术的研究和分析,对该技术的原理和方法进行了全面的探讨,并通过实验证明了该技术的有效性和实用性。在未来的研究中,还需要进一步完善和改进该技术,以满足不同领域对机器人定位和地图构建的需求。

大连理工大学专业学位硕士学位论文
- 3 -
像的 SURF 特征,用 ICP(Iterative Closest Point)算法估计机器人的位姿,然后采用
G2O(General Graph Optimization)方法进行优化
[18]
。
在文献[19]中,Newcombe 等人提出了一种基于 RGB-D 相机的视觉 SLAM 方案
KinectFusion,该方法利用相机获得的深度图像生成点云,通过 ICP 算法实时估计机器
人的位姿,并实现三维重建。该方法是首个基于 RGB-D 相机的实时三维重建系统。之
后,Whelan 等人对 KinectFusion 进行了改进,直接使用 GPU 实现 ICP 算法和直接法的
相机位姿估计,并加入了闭环检测,使用 deformation graph 对三维刚体重建做非刚体变
换,使闭环后两次重建的结果能够重合
[20]
。
文献[21]中 Whelan 等人提出了 ElasticFusion 的 SLAM 方法,该方法利用 RGB 的
颜色一致性估计相机位姿,并利用深度图像生成点云进行 ICP 来估计相机位姿,该方法
充分利用了颜色与深度信息,但是由于代码没有进行优化,所以只适合对房间大小的场
景进行重建。
2014 年,Forster 等人提出了 一种单目的视觉里 程计 SVO(Semi-Direct Sparse
Odometry),该方法基于稀疏直接法,通过最小化稀疏像素点的光度误差来获得相机的
运动。既与特征点法不同,该方法不需要计算描述子进行匹配,所以该方法计算速度极
快,即使在配置不高的计算平台上也能达到实时的效果
[22-23]
。虽然 SVO 能构建稀疏点
云地图,但它没有回环检测和后端优化的部分,不能解决随着机器人运动时间增加而出
现的误差累积问题。同年,Engle 等人提出了 LSD-SLAM(Large Scale Direct SLAM),
LSD-SLAM 将直接法应用到了半稠密的单目 SLAM 中,它不需要计算特征点,但可以
在室外大规模环境中构建半稠密的地图,在后端中使用位姿图优化的方法来优化全局位
姿,在 CPU 上该方法可以实现实时的效果
[24]
。
在文献[25]中,Labbé等人提出了 RTAB SLAM 方法,该方法通过 STM/WM/LTM
的内存管理机制,减少了图优化和闭环检测中需要用到的结点数,保证了系统的实时性
和回环检测的准确性,能够在大的场景中运行。
在文献[26]中,Endres 等人提出了 RGBD-SLAM 算法,该算法是一个非常全面的
SLAM 系统,将 SLAM 领域的图像特征、优化、闭环检测、点云、等技术融为一体,
但是它的缺点是算法的实时性不好,相机必须缓慢运动。
2015 年,Murartal 等人在文献[27]中提出了基于 ORB 特征的单目 SLAM 系统:
ORB-SLAM,该系统为同时运行的三个线程构成,分别为跟踪线程,局部建图线程和回
环检测线程,该系统能够在 CPU上实现实时运行。2017年,该算法扩展成 ORB-SLAM2
[28]
,
在原有单目相机的基础上还可以支持双目相机和 RGB-D 相机的实现。
万方数据


剩余65页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-03-31 上传
2022-08-04 上传
点击了解资源详情
2022-08-03 上传
2022-08-03 上传
2022-08-04 上传

士多霹雳酱
- 粉丝: 23
- 资源: 299
 我的内容管理
展开
我的内容管理
展开







最新资源
- 电信设备-一种基于图片推荐的社区信息服务系统和方法.zip
- FSQCellManifest:一个UITableView和UICollectionView委托和数据源,它提供了一个更简单的统一接口来描述您的节和单元格
- cozy-sinopia:Sinopia 变得舒适
- 带有多丢包网络控制系统的PID控制器设计开题报告.zip
- jquery水平滑动tab选项卡特效代码
- 真棒免费的深度学习论文
- One Extension-crx插件
- Implementation:音频时移器,MP3编码器,微调和并置器,背景音频记录器
- baseballcard_02:第二次分配
- Perceptron:现代视频反馈艺术的诞生。-开源
- Flex-4.5-Android-Component-Library:专为Flex 4.5构建的Android UI组件
- adwaita-rounded:修补Adwaita主题的底角的补丁
- Amped Extension-crx插件
- strawberry:一个用于音乐纹理密度规划的 htmljs 应用程序
- 基于element-ui标签选项卡特效代码
- android_device_asus_Z00A
