5自由度串并联机械手的RP-(2-RRU/1-RUU)结构动力学分析与应用
48 浏览量
更新于2024-08-26
收藏 1.22MB PDF 举报
本文主要探讨了一种具有特殊结构——RP-(2-RRU/1-RUU)的五自由度串并联机械手在自动生产线中的应用。这种机械手被设计用于物料的高效装卸任务,特别强调了其在保证生产安全性和高精度的同时,具备快速操作的能力。其设计融合了串联机构的大工作空间优势和并联机构的高精度与刚度特性,使得它能够在复杂的生产环境中稳定运行。
动力学分析是本文的核心部分,随着结构复杂性的提升,动力学模型的建立和分析变得更为棘手。作者采用有限元分析软件,通过模态分析来评估机械臂在不同频率下的动态响应,这有助于理解和优化机械结构的振动特性,从而提高系统的稳定性。此外,还进行了谐波响应分析,以揭示机械臂在受周期性载荷时的行为,这对于预测和控制系统的动态性能至关重要。
逆动力学建模是动力学分析的另一个关键步骤,文中采用牛顿-欧拉方法,这是一种经典的动力学求解技术,将整个系统分解为各个部分的运动,从而准确计算出每个关节和构件的力矩需求。通过这种方式,可以有效地设计驱动系统,确保机械手在高速运动中仍能保持精确的动作。
动态仿真在验证动力学模型的准确性方面起到了决定性作用。通过计算机模拟,研究人员能够观察和调整模型参数,以确保实际机械手在实际运行过程中的性能与预期一致。这对于优化控制器设计、降低能耗以及预防潜在的故障都极其重要。
最后,本文的工作对轨迹规划和控制系统的设计具有深远影响。由于串并联机械手的特殊结构,其运动轨迹可能比传统的机械臂更复杂,因此高效的轨迹规划算法对于保证操作的平滑性和安全性至关重要。同时,通过深入了解动力学特性,可以为设计适应性强、响应快速的控制系统提供理论依据。
这篇论文不仅提供了关于五自由度串并联机械手的具体设计,还深入探讨了其动力学分析的关键技术,为自动化生产线上的高效和安全操作提供了科学的理论支持和技术解决方案。
Abstract—In this paper, a 5-DOF serial-parallel manipulator
with RP-(2-RRU/1-RUU) structure is proposed. This
manipulator is used to the automatic production line, to
complete the materials’ loading, delivery and unloading. In
order to ensure the safety and high efficiency production, the
manipulator has good stiffness and high accuracy, and is
suitable for the fast operation. Based on the above requirements,
the manipulator has the big work space characteristic of the
serial mechanism and the high precision and stiffness
characteristic of the parallel mechanism. However, the difficulty
of its dynamics analysis is increasing. In this paper, the modal
analysis and the harmonic response analysis are carried out
using finite element analysis software, and the dynamic
characteristics of the manipulator are derived. The inverse
dynamics modeling has been performed based on the
Newton-Euler method. The dynamics simulation is carried out
to check the correctness of dynamics modeling. This study is
also significant to the trajectory planning and control system.
Keywords: serial-parallel; dynamics; Newton-Euler method
I. INTRODUCTION
HERE are three categories of machine arm: series type,
parallel type, and serial-parallel type[1]. Series type and
parallel type manipulators have their own flaws: the series
manipulator is of small stiffness, low accuracy, and not
suitable for the fast operation; the parallel manipulator is of
little work space, strange position, and easy to interfere. The
serial-parallel manipulator is compatible with their
advantages: good stiffness, high precision, big work space,
easy to fast operation [2]. The research object of this paper is
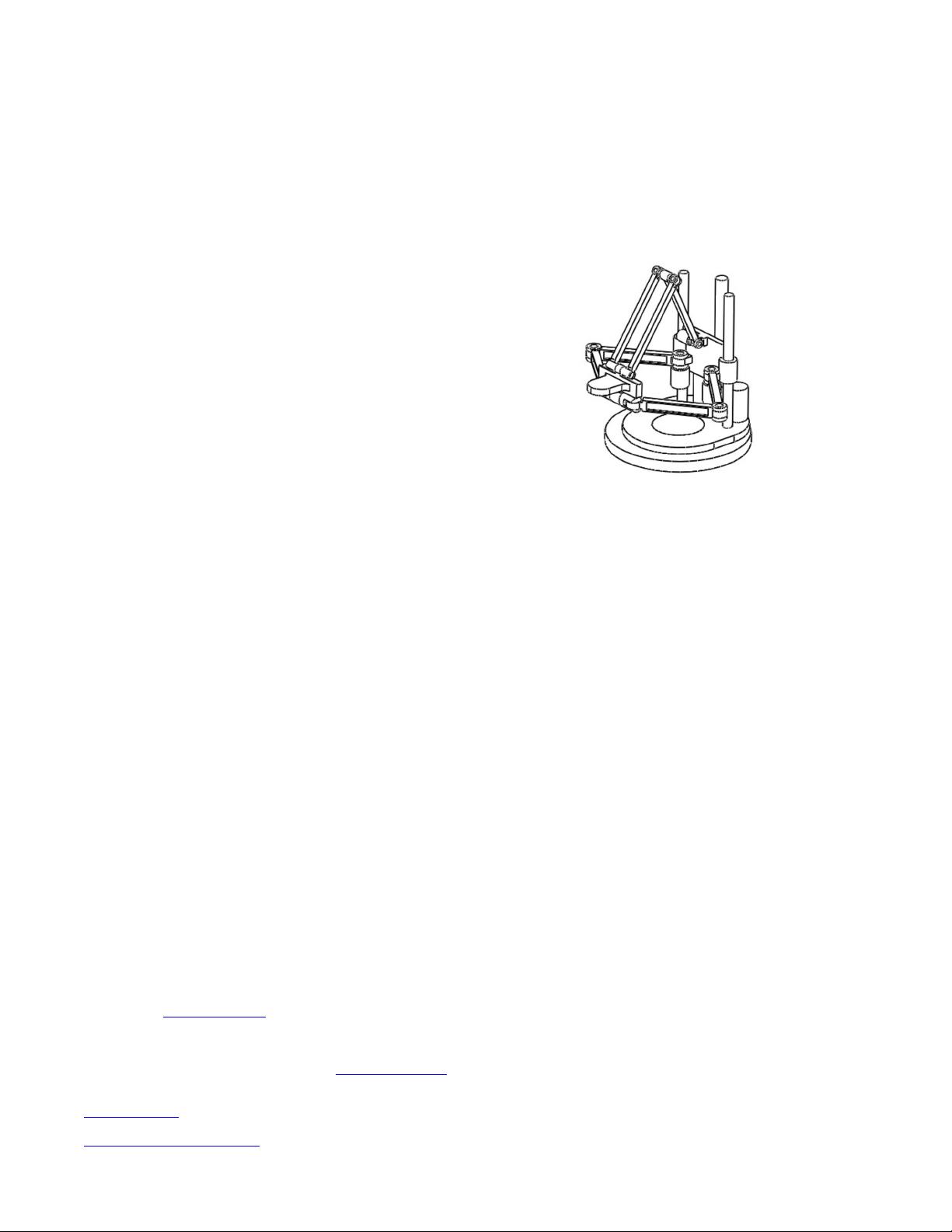
a five DOF serial-parallel manipulator, as is shown in Fig.1.
The manipulator is constituted by a serial part and a
2-RRU/1–RUU parallel part. The serial part is constituted by
a rotary joint on the base and a mobile joint on the shoulder.
The parallel part has three branch chains: two RRU structure
chains and one RUU structure chain.
This research is supported by Shenzhen/Hongkong Innovation Circle
Project (Project No.ZYB200907070024A), Shenzhen Key Laboratory of
Precision Engineering (No.CXB201005250018A), National Natural Science
Foundation of China (Project No.61210013, 61175124)
Chao Hou is with the Harbin Institute of Technology, Shenzhen Graduate
School(E-mail: chao.hou@siat.ac.cn)
Peng Zhang is with Shenzhen Institutes of Advanced Technology,
Chinese Academy of Sciences. The Chinese University of Hong Kong, Hong
Kong, China and is the co-member of Shenzhen Key Laboratory of Precision
Engineering. (Phone: +86-755-86392180, E-mail: zhangpeng@siat.ac.cn)
Ying Hu is with Shenzhen Institutes of Advanced Technology, Chinese
Academy of Sciences. The Chinese University of Hong Kong (E-mail:
ying.hu@siat.ac.cn)
Jianwei Zhang is with University of Hamburg, Germany (E-mail:
zhang@informatik.uni-hamburg.de).
Now the robot is developing to high precision, high
stiffness and high speed, so in order to ensure the safety and
high precision, the robot must have good dynamic
characteristics and we have to do the dynamics research. In
this paper, we do the dynamic analysis for the serial-parallel
robot by ANSYS, and we get its natural frequency and
vibration model [3,12]. Through this, we can find the weak
link of the structure, in order to ensure its stiffness.
Robot dynamics and the dynamic model is an important
branch of robot research, and the dynamic model is the
foundation of controlling robot [4]. Dynamics is the study of
the relationship between the movement of objects and the
forces. Because of the complexity of the parallel robot, the
dynamic model is usually a complex system of multi-degree
of freedom, multivariable and highly nonlinear parameter.
Therefore, the analysis of dynamic characteristics of the robot
needs some special methods. There are many analysis
methods, such as Lagrange method, Newton-Euler method,
Gauss method, Kane method and so on [5]. The research of
dynamic modeling in the series robot field has made a rapid
progress. However, because of the complexity of the parallel
mechanism, the research content of parallel robot mostly
involves mechanism and the kinematics, and dynamics
research is relatively few. Fichter [6] and Merlet established
Stewart dynamics equations in the event of ignoring the
inertia effect in the legs. Sugimoto took Stewart platform for
example to do the dynamics problems of parallel robot.
However, there are not detailed dynamic derived in his
analysis. Geng made simplifying assumption to the geometric
shape and inertia disturbance of parallel robot, and establish
the parallel robot dynamics equations by using Lagrange
method. ZhenHuang and HongboWang conducted force
analysis by using impact coefficient method and established
the dynamic model of the parallel robot [7].
The Dynamics Analysis for a Five DOF Serial-parallel Manipulator
with RP-(2-RRU/1-RUU) Structure
Chao Hou, Peng Zhang*, Ying Hu, Jianwei Zhang
T
Fig.1 The 3D model of the manipulator
978-1-4673-2126-6/12/$31.00 © 2012 IEEE
1564
Proceedings of the 2012 IEEE
International Conference on Robotics and Biomimetics
December 11-14, 2012, Guangzhou, China
下载后可阅读完整内容,剩余5页未读,立即下载
2010-05-19 上传
2011-12-24 上传
2020-10-25 上传
2021-01-19 上传
2020-10-22 上传
2021-08-28 上传

weixin_38551749
- 粉丝: 7
- 资源: 936
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
