面向对象程序的图基泛型类型系统
196 浏览量
更新于2024-07-15
收藏 751KB PDF 举报
“A graph-based generic type system for object-oriented programs”探讨了一种基于图模型的面向对象程序的泛型类型系统,该系统支持递归类型、泛型和接口等现代面向对象语言(如Java)常见的特性。通过经典图论,定义了类型图、实例化图和结合图,直观地展示了复杂面向对象程序中类型、泛型和接口之间的关系。模型采用名义节点和匿名节点的组合,分别表示由名称标识的类型和结构,并定义了基于图的关系和操作,包括等价性、子类型和构造。
在面向对象编程(OO programs)中,类型系统是至关重要的,它确保了代码的正确性和安全性。本文提出的图基类型系统(graph-based type system)旨在增强这种类型检查,特别是对于具有泛型和接口的复杂程序。泛型(generics)允许在不牺牲类型安全性的前提下,创建可重用的代码,而接口(interfaces)则定义了类必须实现的方法,提供了多态性。
类型图(type graphs)是这个模型的核心部分,它们代表了程序中的各种类型以及它们之间的关系。这些图可以清晰地描绘出类型层次结构,包括继承和实现关系。实例化图(instantiation graphs)则用于表示泛型类型的实例化过程,即如何将泛型参数替换为具体的类型。结合图(conjunction graphs)可能用来展示多个接口或类型的组合情况,这在实现多重继承或接口实现时特别有用。
模型中,名义节点(nominal nodes)用于表示通过名称标识的类型,比如类或命名的接口。另一方面,匿名节点(anonymous nodes)则表示结构相似但未被明确定义的类型,例如匿名类或内部类。这样的区分使得类型系统能更好地处理动态类型和结构类型的情况。
此外,文章还讨论了类型间的等价性(equivalence)、子类型关系(subtyping)和构造(construction)等概念。等价性确保了不同类型但逻辑上相等的实例可以互换使用;子类型关系允许子类的对象可以被当作父类来使用,增强了代码的灵活性;构造则是指如何通过现有的类型构建新的类型,这在泛型和接口的组合中尤其关键。
通过这种图模型,开发者和编译器可以更有效地理解和验证程序中的类型行为,从而减少类型错误并提高代码质量。该模型对于编译器设计、类型检查算法和静态分析工具有着重要的理论和实践价值。同时,它也为面向对象语言的进一步发展和优化提供了新的研究方向。
Wei KE et al. A graph-based generic type system for object-oriented programs 113
and the frame of a method consists of the parameters of the
method. These structures are also characterized in a type
graph. In fact, each type, static table or method frame of a
program is represented as a subgraph of the type graph of
the program. There is a designated node in such a subgraph,
called the root of the graph of the type, static table or method
frame. For a nominal type, the root of its graph is the name of
the type, while for a structural type, a static table or a method
frame, the root is anonymous. We call the root of a nomi-
nal type a nominal node and an anonymous root a structural
node.
We use D to denote the primitive type (data type) names
and U the class (user type) names, and C = D∪Uthe type
constants. Let X be the type variables. Thus, C∪Xis the set
of nominal nodes. Using S to denote the structural nodes and
assuming all these sets are mutually disjoint, we have the set
N = C∪X∪Sof nodes of type graphs.
For the labels of edges, let A be the set of the names of
variables, attributes, methods and parameters, which is dis-
joint with N. We introduce a special label “” for the class
inheritance relation, and another special symbol “σ” to label
an incoming edge to the root of a static table. If a class con-
tains a type variable α, the class is generic. A generic class
can be instantiated by mapping α to some actual type u.We
use an edge labeled by the type variable α and targeting u to
record the mapping α → u. We put such an edge to the static
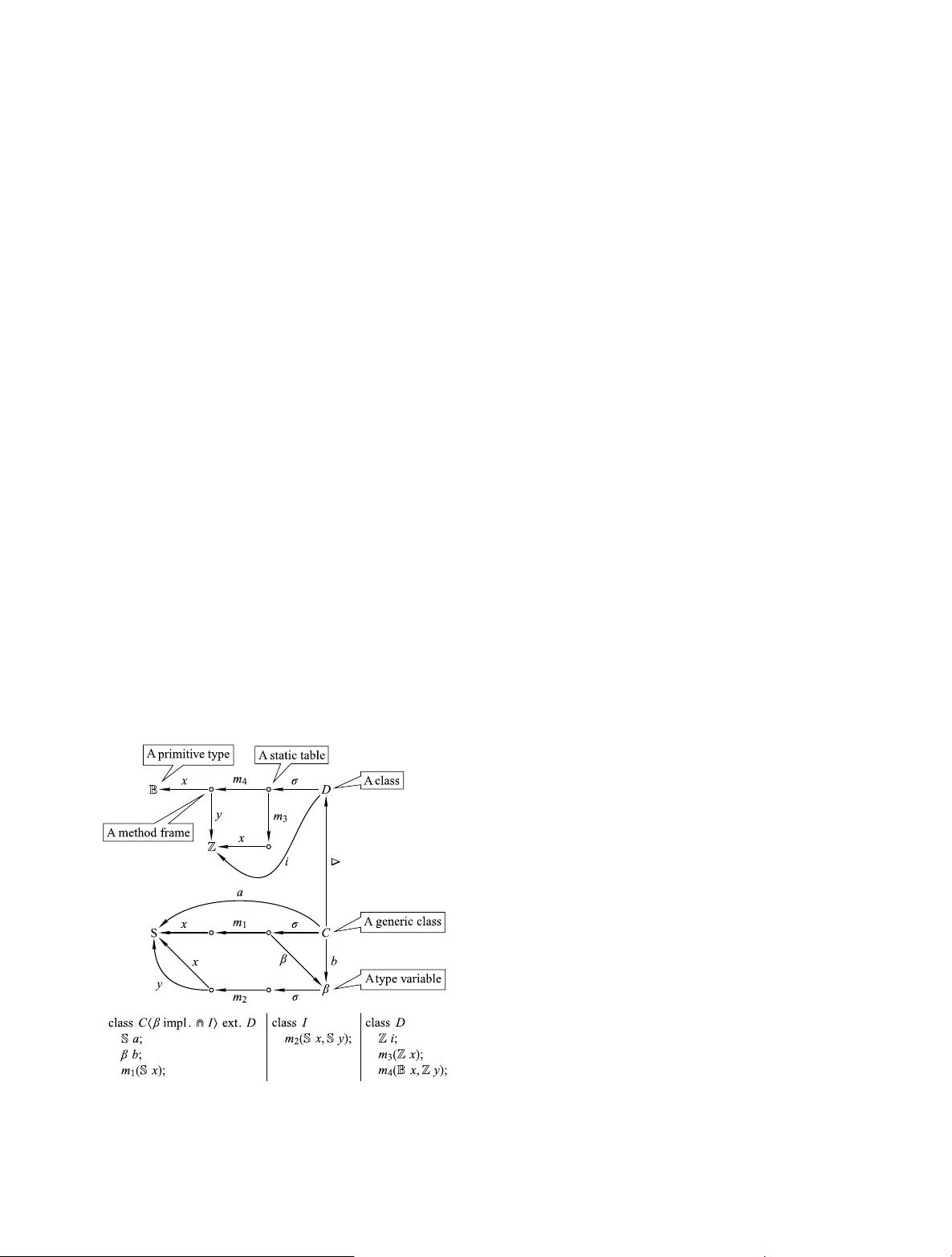
table of each generic class and class instantiation, see Fig. 1.
Thus, A
+
= A∪X∪{,σ} is the set of all labels of edges.
Fig. 1 A type graph and the corresponding class declarations
Definition 1 (Type graph) A type graph is a directed and
labeled graph Γ=N, E,whereN ⊆Nis the set of nodes,
and E : N ×A
+
→ N is the set of edges.
Notice that E is a function implies that labels of the out-
going edges of a node are distinct. Thus the names of at-
tributes and methods of a class are different, and parameters
of a method are different. In particular, there is no multiple
inheritances allowed in this model.
Figure 1 shows a type graph and the corresponding class
declarations. In the graph, C is a generic class, with a type
variable β and a superclass D. Notice the β-labeled edge tar-
geting at the node β.Ifβ is instantiated to an actual type,
the β node is replaced by the node of the actual type. C has
two attributes a and b of types S and β, respectively, and a
method m
1
with a parameter x of type S. The type variable β
implementing class I has a method m
2
with two parameters
x and y both of type S, meaning that any replacement of β in
an instantiation of C must define such a method. D is a non-
generic class with an attribute i and two methods m
3
and m
4
,
where m
3
has a parameter x and m
4
has two parameters x and
y.
We use s
a
−→ t to represent an a-labeled edge from s to t,
and call s the source node and t the target node of the edge.
We use s
a
−→·to represent an a-labeled outgoing edge of s
and ·
a
−→ t an a-labeled incoming edge to t. For a given graph
Γ=N, E,weuseΓ.ns to denote the set N of nodes, and
Γ.es the set E of edges.
Apathp is a sequence of consecutive edges, denoted as
n
0
a
1
−→ n
1
···n
k−1
a
k
−→ n
k
or simply n
0
a
1
a
2
···a
k
−−−−−−→ n
k
, if we are not
concerned with its intermediate nodes. We also overload the
notation of set membership “∈”, using n ∈ Γ, e ∈ Γ and p ∈ Γ
to denote that a node n, an edge e and a path p are in graph Γ,
respectively.
For a path p,letsource (p)andtarget (p) be the starting
and ending node, respectively. We say that a node n
2
is reach-
able from a node n
1
, denoted as n
1
−→
∗
n
2
,ifthereisapath
from n
1
to n
2
.Apathn
1
a
−→ ···
a
−→ n
2
is simply denoted as
n
1
a
−→
∗
n
2
.
3.2 Rooted graphs
In the type graph Γ of a program, an individual type T,say
a class, is represented by a node r of Γ, the nodes reachable
from r and the edges between these nodes. These nodes and
edges form a subgraph of Γ with r being designated as the
root. This rooted graph represents the type T.
Definition 2 (Rooted graph) Given a node r of a graph Γ,
the rooting operation Γ r returns the subgraph G = N, E, r
of Γ such that
N = {n | r −→
∗
n ∈ Γ},
剩余25页未读,继续阅读
2019-01-09 上传
2021-03-19 上传
2018-09-11 上传
2023-07-15 上传
2023-07-20 上传
2023-07-15 上传
2023-09-05 上传
2023-04-12 上传

weixin_38657376
- 粉丝: 4
- 资源: 928
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
