
应用机型
APPLICATION
小型单轴机器人
T RA NSERVO
单轴机器人
FLIP-X
线性单轴机器人
PHASER
直交机器人
XY-X
水平多关节机器人
YK-XG
拾放型机器人
YP-X
洁净型机器人
CLEAN
控制器
CONTROLLER
各种信息
INFORMATION
356
机器人定位
控制器
脉 冲 列
驱动器
机 器 人
控制器
iVY
机器人定位
控制器
脉 冲 列
驱动器
机 器 人
控制器
iVY
选配件
选配件
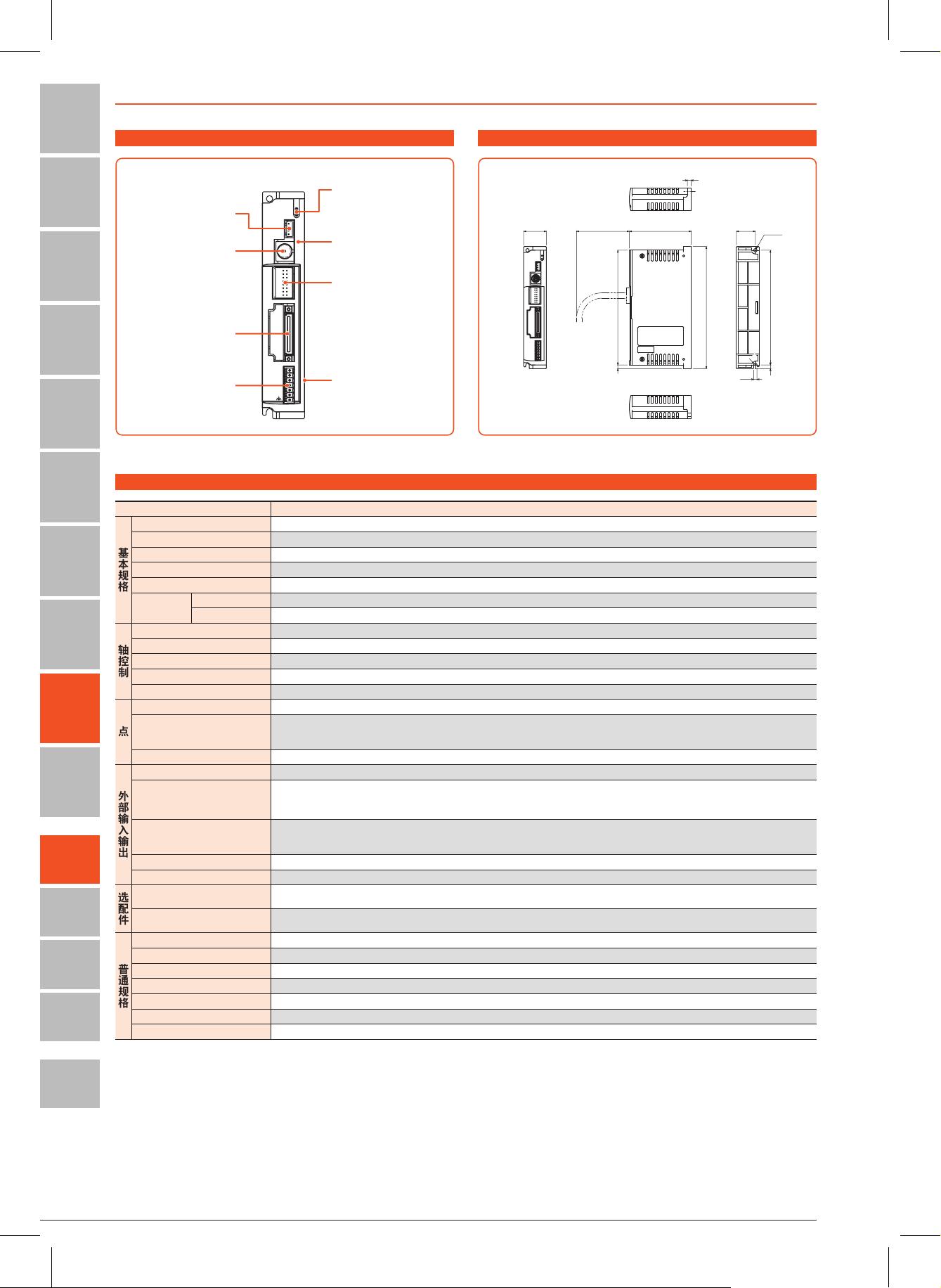
TS-S2/TS-X/TS-P
■
TS-S2 各部分名称
PWR
SRV
COM2
COM1
ROB
I/O
I/O
ES1
ES2
ES-
MP24V
CP24V
0V
ರ
ဪએರ 1DŽCOM1Dž
એ HT1!࣓ࠞࢩؿએರă
ࢩರീ I/O એರ )ROB I/O*
ᅂᅙཤቜဪࠖĂᆊٞݥರك
ࢩರീ༭රؿตֵĂตൠኟᅂ
એರă
I/O એರ!)I/O*
ޭଳLjৰჵၤᇎ NPNĂPNPĂ
CC-LinkĂDeviceNetă
ۇځߙކஙడ!) ነࢩՁஅ *
ၗળࠖ
ဪએರ 2DŽCOM2Dž
جೇཝ෪ᅂ!) ᇴᅂ *ă
ካນቑ෯ف
)PWRLjERR*
ᅂ!LED!ቑ෯ف෯ರؿካນă
٢ᆑએರ
ነ٢ᆑࢽ٢ᆑ
ตൠᅂએರă
■
TS-S2 外形图
1525
82
(70)
30
5
162
5 152
25
4.5
4.5
RR
■
TS-S2 基本规格
项目
TS-S2
基本规格
控制轴数
1
轴
可控制的机器人
TRANSERVO
系列
最大耗电
70VA
~
110VA
外形尺寸
W30
×
H162
×
D82mm
主机重量 约
0.2kg
输入电源
控制电源
DC24V
±
10%
马达电源
DC24V
±
10%
轴控制
运转方式 迹点定位 (按指定点号码进行定位运转)
运转类型 定位运转、定位连续运转、推进运转、寸动运转
位置检测方式 旋转变压器
分辨率
4096
脉冲/转、
20480
脉冲/转
原点复位方式 增量式
点
点数
255
点
点类型设定
①标准设定: 速度和加减速分别按最大的比率 (
%
) 设定
②自定义设定:速度和加减速以
SI
单位设定
点提示方式 手动数据输入 (坐标值输入)、示教、直接示教
外部输入输出
I/O
接口
NPN
、
PNP
、
CC-Link
、
DeviceNet
、
EtherNet / IP
中选择
输入
伺服
ON
(
SERVO
)、复位 (
RESET
)、启动 (
START
)、联锁 (
/LOCK
)、原点复位 (
ORG
)、
手动模式 (
MANUAL
)、寸动- (
JOG-
)、寸动+ (
JOG+
)、点号码选择 (
PIN0
~
PIN7
)
输出
伺服状态 (
SRV-S
)、警报 (
/ALM
)、运转结束 (
END
)、执行运转中 (
BUSY
)、控制输出 (
OUT0
~
3
)、
点号码输出
0
~
7
(
POUT0
~
POUT7
)
外部通信
RS-232C
1CH
安全电路 紧急停止输入 (
2
触点)、主电源输入准备结束输出
选配件
手持编程器
HT1
、
HT1-D
(附启动开关)
电脑用支持软件
TS-Manager
普通规格
使用温度
0
℃~
40
℃
保存温度
-10
℃~
65
℃
使用湿度
35%
~
85%RH
(无结露)
保存湿度
10%
~
85%RH
(无结露)
环境 无直射阳光的室内。无腐蚀性气体、易燃性气体、油污、尘埃
抗震动
XYZ
各方向
10
~
57Hz
半振幅
0.075mm
57
~
150Hz
9.8m/s
2
保护功能 位置检测故障、电源模块故障、温度异常、超载、过电压、低电压、位置偏差过大
剩余10页未读,继续阅读

weixin_38616435
- 粉丝: 1
- 资源: 908
 我的内容管理
展开
我的内容管理
展开







最新资源
- 十种常见电感线圈电感量计算公式详解
- 军用车辆:CAN总线的集成与优势
- CAN总线在汽车智能换档系统中的作用与实现
- CAN总线数据超载问题及解决策略
- 汽车车身系统CAN总线设计与应用
- SAP企业需求深度剖析:财务会计与供应链的关键流程与改进策略
- CAN总线在发动机电控系统中的通信设计实践
- Spring与iBATIS整合:快速开发与比较分析
- CAN总线驱动的整车管理系统硬件设计详解
- CAN总线通讯智能节点设计与实现
- DSP实现电动汽车CAN总线通讯技术
- CAN协议网关设计:自动位速率检测与互连
- Xcode免证书调试iPad程序开发指南
- 分布式数据库查询优化算法探讨
- Win7安装VC++6.0完全指南:解决兼容性与Office冲突
- MFC实现学生信息管理系统:登录与数据库操作
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


