STM32实现精准舵机控制:从原理到实践
需积分: 31 56 浏览量
更新于2024-07-21
2
收藏 780KB PDF 举报
本章节详细介绍了如何利用STM32单片机来驱动舵机。首先,舵机是一种用于角度伺服控制的设备,实际是一种特殊的伺服电机,它在需要角度连续变化并保持稳定的应用中非常常见。舵机的工作原理涉及接收机提供的信号处理,内部有基准电路产生周期性脉冲,通过对比直流偏置电压与电位器电压来控制电机的转向和速度。
舵机的控制方法主要依赖于一个大约20毫秒的时基脉冲,其中高电平部分对应不同的角度控制。例如,一个180度伺服,0.5ms代表0度,1.5ms代表90度,以此类推。通常,小型舵机工作电压在4.8V或6V,转速较慢,这就要求在控制角度时保持一定的脉宽范围,避免过快的变化导致响应滞后。STM32的GPIO口可以直接驱动舵机,通过发送周期为20ms的PWM信号来控制其动作。
为了实现更精确的角度控制,特别是小于1度的角度变化,可以通过微调PWM信号的占空比来实现。例如,如果采用1024个等分,每个细分对应0.09度的变化,这样就可以精细地控制舵机转动任意角度,如0~180度之间。
总结来说,本章节讲解了STM32驱动舵机的基础知识,包括舵机的工作原理、控制信号的发送方式以及如何通过调整PWM信号实现精确的伺服控制。这对于开发基于STM32的机器人、自动化设备或者航模系统等领域具有实用价值。
/29
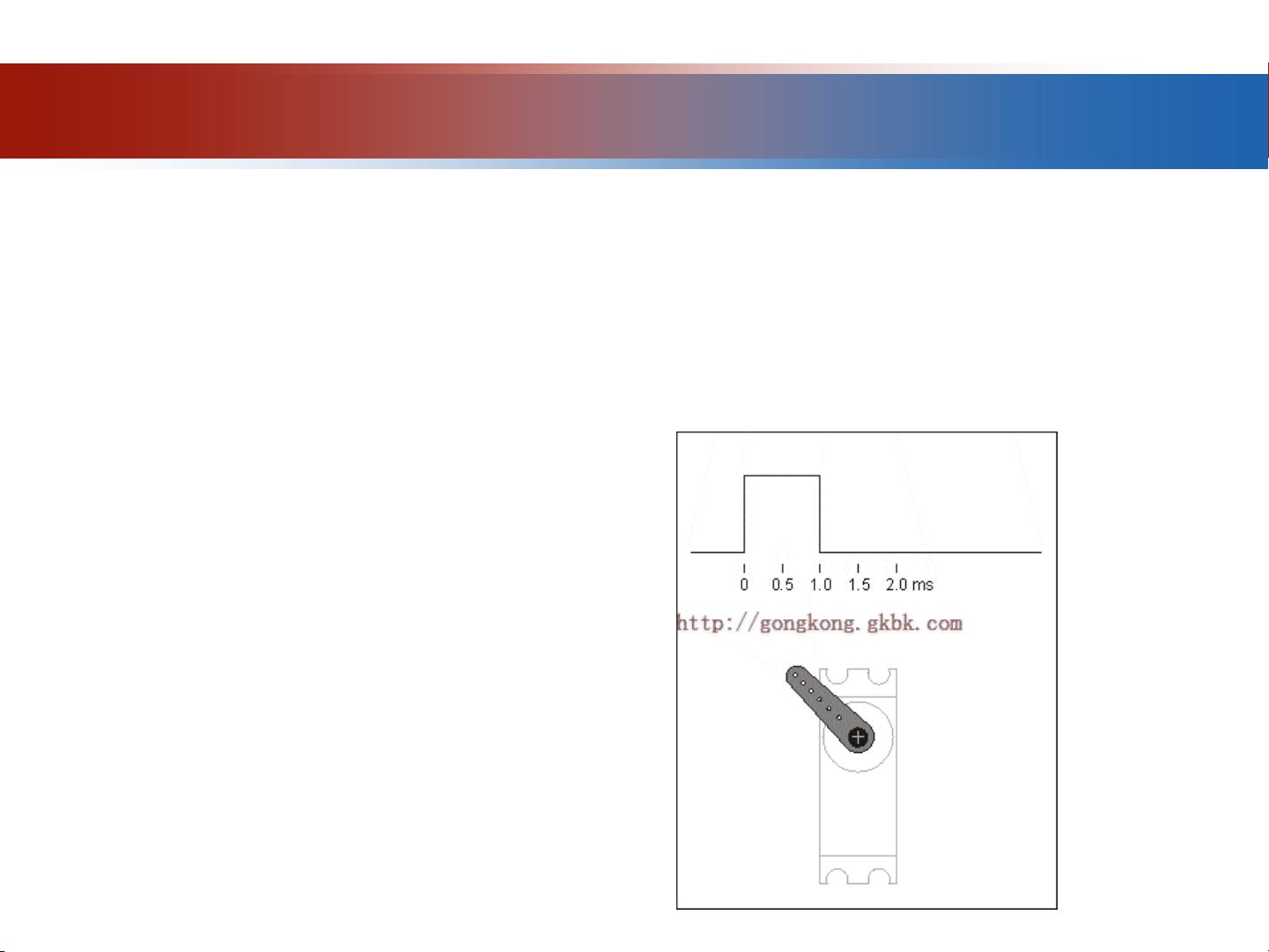
舵机的控制一般需要一个20ms左右的时基脉冲,该脉
冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制
脉冲部分。以180度角度伺服为例,那么对应的控制关
系:
0.5ms----------- 0度
1.0ms----------- 45度
1.5ms----------- 90度
2.0ms-----------135度
2.5ms-----------180度。
12.3 舵机的控制方法
5
剩余20页未读,继续阅读
879 浏览量
261 浏览量
1494 浏览量
300 浏览量
113 浏览量
点击了解资源详情
271 浏览量
110 浏览量









