CMU-BOSS无人车运动规划详解
需积分: 0 168 浏览量
更新于2024-08-04
收藏 3.03MB DOCX 举报
"BOSS上的运动规划1"
在无人车领域,运动规划是核心部分,它决定了车辆如何从当前位置安全有效地到达预设的目标位置。在CMU-BOSS无人车系统中,运动规划包含了多个关键步骤,涉及算法设计、轨迹生成、评估与选择等过程。以下是对这些步骤的详细解释:
首先,运动规划始于确定运动目标,这通常来源于行为决策层的指令,例如,车辆需要到达某个路口或避开障碍物。接下来是路径规划,这一步需要考虑环境因素,确保车辆能在复杂的道路条件下行驶。
轨迹生成是运动规划的核心环节。模型-预测轨迹生成器(Model-predictive trajectory generator)是一种常用的方法,它通过解决一个参数化控制问题来生成一系列可能的轨迹,满足车辆的动力学约束。这一过程涉及到一组微分方程,描述车辆的动力学模型。约束方程确保车辆的行驶轨迹符合道路规则,例如,最小转弯半径、曲率速率限制、加速度和减速限制,以及控制输入的延迟。
车辆模型的精度直接影响到预测规划的准确性。在BOSS系统中,车辆模型综合了多种限制条件,如最小转弯半径、曲率速率极限、最大加速度和减速,以及控制输入的延迟。通过欧拉积分法,可以模拟这些模型来验证约束方程。
轨迹的形状和动态特性由基于时间的线性速度函数和基于弧长的曲率函数来描述。线性速度函数有四种基本形态,包括恒定速度、线性上升、线性上升后再恒定以及梯形速度,这些可以根据具体任务(如停车、保持距离等)进行选择。曲率函数则反映了车辆转向的灵活性。
在所有候选轨迹生成后,评估函数便发挥了作用。评估函数根据当前环境,如静态和动态障碍物、路缘、速度、转弯曲率和路径偏离等因素,对每条轨迹进行评分。最终,选择得分最高的轨迹作为车辆的行驶路径。
BOSS上的运动规划是一个复杂且精细的过程,它整合了预测控制理论、车辆动力学建模和环境感知,确保无人车能够在各种情况下做出安全、合理的行驶决策。
CMU-BOSS 上的运动规划
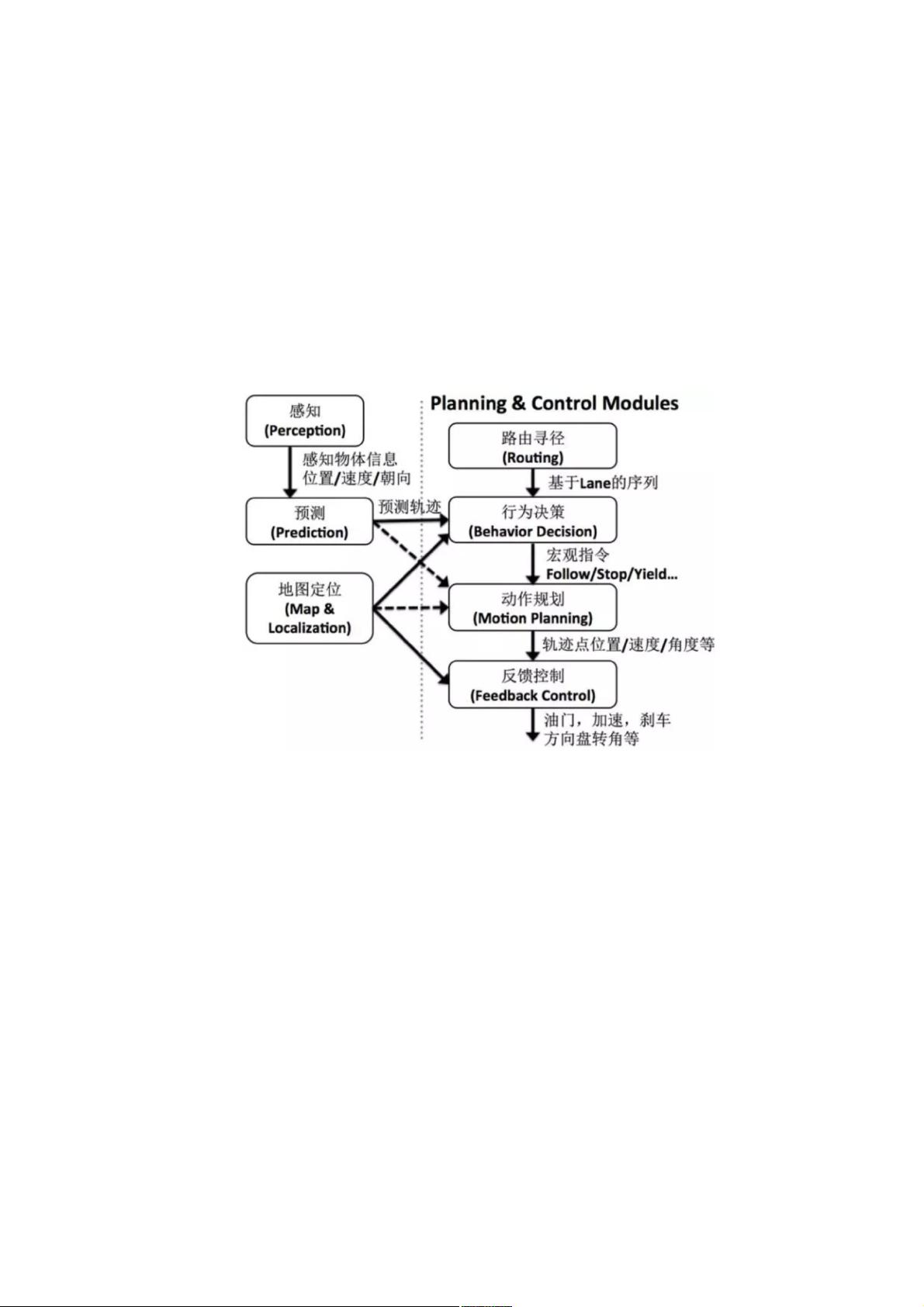
首先,让我们来看看一张非常典型的图 1-1 无人车软件系统功能模块,从图中可以看
到在行为决策层下游的模块就是动作规划(Motion Planning),下面我们主要来讲述在
CMU-BOSS 车上的动作规划系统。
图 1-1 无人车软件系统功能模块图
运动规划层负责处理从当前位置到行为层发出的目标位置的运动规划。运动规划层会
考虑到周边的环境以及目标位置,从而确保车辆能正确地在道路上行驶。一般步骤为:1)
得到运动目标 2)为该目标制定一个路径 3)生成一系列的候选轨迹,这些轨迹会随着移
动而变化 4)评估函数选择出最佳轨迹(评估函数会根据当前周边的环境的不同而不同,
考虑到的因素主要为一些静止的和移动的障碍物、路缘、速度、转弯曲率、是否偏移路
径) 5)车辆按选定轨迹行驶。下面开始详细介绍各个步骤如何实现。
下载后可阅读完整内容,剩余7页未读,立即下载
2020-03-03 上传
2020-03-03 上传
2021-12-10 上传
2021-10-06 上传
2021-10-10 上传
点击了解资源详情
2023-03-31 上传
2024-11-08 上传
2024-11-08 上传

爱设计的唐老鸭
- 粉丝: 29
- 资源: 291
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
