
DARMS et al.: OBSTACLE DETECTION AND TRACKING FOR THE URBAN CHALLENGE 477
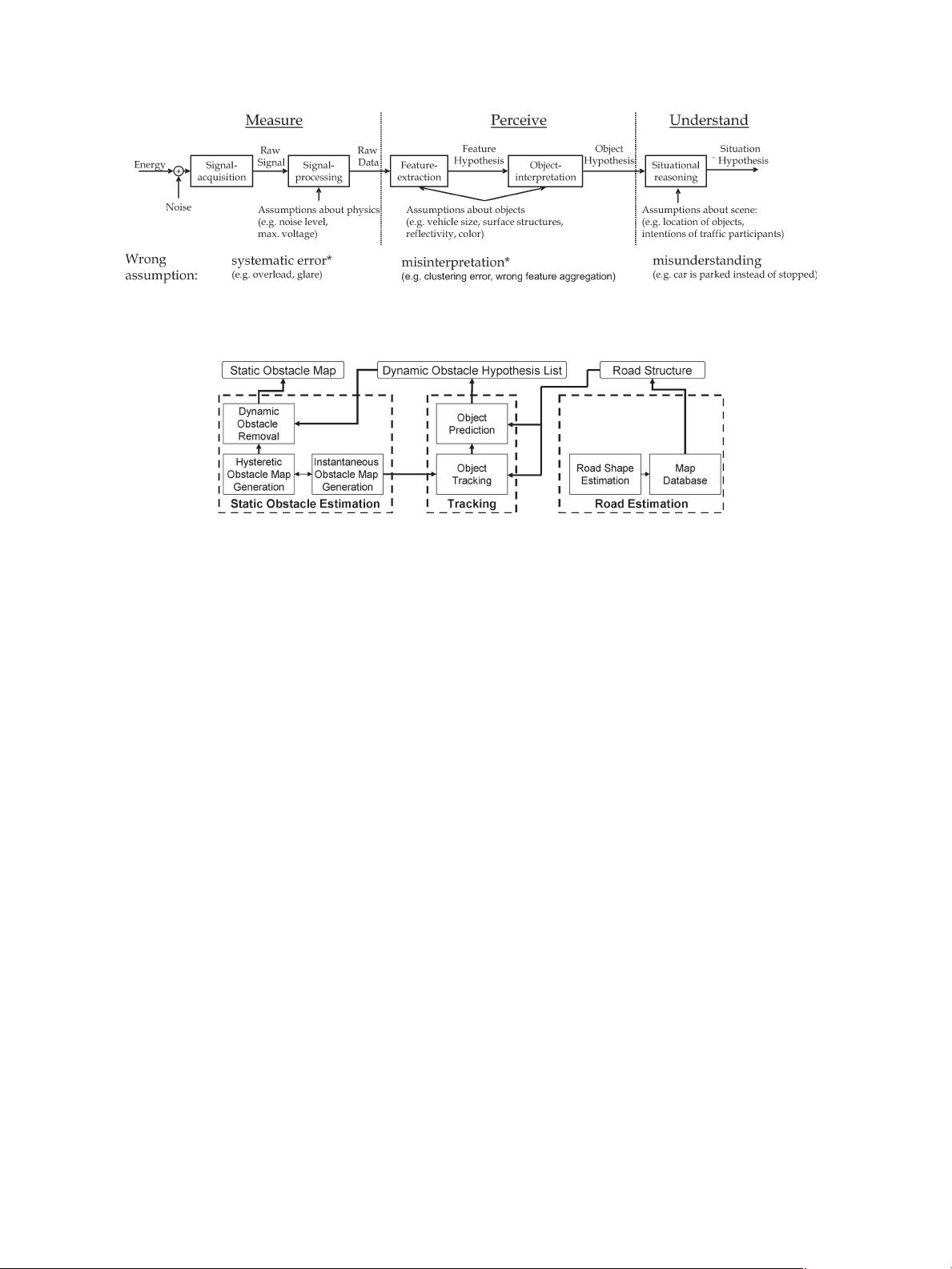
Fig. 2. General p erception p rocess that illustrates how raw energy detected from the environment is converted into a situational understanding of theworld
around the vehicle. This figure also illustrates where noise and errors can be introduced into the system and the modeling assumptions that specify how the
information is altered at each step. (Note that the categories of errors marked with ∗ are generally referred to throughout this paper as artifacts.)
Fig. 3. Perception architecture (see [1]).
2) Static obstacles: Static obstacles are obstacles that are
assumed not to move during the observation period (on
or off road).
3) Dynamic obstacles: Dynamic obstacles are obstacles that
potentially move during the observation period. For the
Urban Challenge, only cars fall into this category. Note,
however, that a car does not necessarily have to be a
dynamic obstacle, as it can also be a parked vehicle that
will ne ver move.
B. Perception System Architecture
The architecture of the perception system, as shown in Fig. 3,
is analogously divided to the world model into the follow-
ing three subsystems: 1) a road estimation subsystem, which
generates information about the road structure; 2) a tracking
subsystem, which is responsible for generating dynamic obsta-
cle hypotheses; and 3) a static obstacle estimation subsystem,
which estimates the location of static obstacles.
1) Road Structure: The road structure is represented as a
topological network of segments, intersections, and zones. A
segment contains a number of road lanes, and each lane has
a specified width and direction. The shape and curvature of a
particular lane are determined by a set of points that are spaced
roughly 1–2 m apart from each other. Intersections are junctions
that explicitly connect lanes from different segments. Zones
are free-form open areas, such as parking lots, which have no
explicit restrictions on where vehicles can travel.
In our system, the road structure was derived from the
given road network definition file and information from a high-
precision satellite image. With this, the data were known with
high confidence. The information was used inside the tracking
system for computational efficiency and to reduce the number
of sensor artifacts (see Section IV). The road-estimation sys-
tem, however, also included a road shape-estimation algorithm,
which could deliver information about the road in cases where
the map was not sufficient. This, however, was not necessary on
race day.
2) Dynamic Obstacle Hypothesis List: The classification of
an obstacle as dynamic obstacle requires scene understanding
(e.g., to distinguish a parked from a temporarily stopped ve-
hicle). The perception system only provides a list of dynamic
obstacle hypotheses. These are all obstacles that potentially
belong to the class of dynamic obstacles. Dynamic obstacles
are represented by a shape model and state variables, such as
position, velocity, and acceleration (see Section IV-A).
For every dynamic obstacle hypothesis, two flags are pro-
vided as follows: 1) the current movement state, i.e., moving
and not moving, and 2) the movement history, i.e., observed
moving and not observed moving. The flag moving is set once
the tracking subsystem decides that the object is currently in
motion. The flag observed moving is set once the tracking sys-
tem decides that the object has changed its position. With this
definition of a dynamic obstacle, it is obvious that, whenever
the flags moving and observed moving are set, the obstacle
hypothesis belongs to the class of dynamic obstacles. If only
the flag observed moving is set, the obstacle may belong to the
class of static obstacles (e.g., vehicle stalled). However, in our
system, all objects that have only the observed moving flag set
are directly treated as dynamic obstacles. Testing showed that
this is a good approximation for short observation periods.
In certain situations, sensors cannot detect an object. This
holds true, for example, if an object is not within the field of
view of a sensor or part of the field of view is occluded. (Sensor
occlusions were not modeled within our system.) However,
this can also occur due to sensor artifacts. Dynamic obstacle
hypotheses are only maintained by the tracking system as long
as the sensor data can support the estimation of state variables.
剩余10页未读,继续阅读
heshimin
- 粉丝: 0
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- ExtJS 2.0 入门教程与开发指南
- 基于TMS320F2812的能量回馈调速系统设计
- SIP协议详解:RFC3261与即时消息RFC3428
- DM642与CMOS图像传感器接口设计与实现
- Windows Embedded CE6.0安装与开发环境搭建指南
- Eclipse插件开发入门与实践指南
- IEEE 802.16-2004标准详解:固定无线宽带WiMax技术
- AIX平台上的数据库性能优化实战
- ESXi 4.1全面配置教程:从网络到安全与实用工具详解
- VMware ESXi Installable与vCenter Server 4.1 安装步骤详解
- TI MSP430超低功耗单片机选型与应用指南
- DOS环境下的DEBUG调试工具详细指南
- VMware vCenter Converter 4.2 安装与管理实战指南
- HP QTP与QC结合构建业务组件自动化测试框架
- JsEclipse安装配置全攻略
- Daubechies小波构造及MATLAB实现
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


