EPSON机械手编程详解:姿态控制与点数据设置
爱普生机械手编程指南深入解析
一、机械手坐标系与基本知识
1.1 SCARA机械手坐标系统
SCARA机械手的运动主要由三个直线轴(XY平面)和一个旋转轴(Z轴)组成,以及可能的附加轴(U轴,旋转轴),分别代表前后左右移动、上下移动以及旋转。在编程时,理解这些轴的运动对于确保精确的动作至关重要。
1.2 垂直6轴型机械手
这种机械手具有六个独立的轴,包括三个主轴和额外的两个旋转关节,允许更灵活的动作范围。为了准确控制,编程时需要设定手臂姿势,以确保在指定位置上的稳定作业。手臂姿势可以通过手动设置(使用/L或/R等标识左手或右手)或在程序中通过特定的指令(如A、B、F、NF)来指定,每种姿势对应不同的关节角度组合。
2.1 臂部姿势示意图
为了减少位移偏差和避免碰撞风险,机械手在每个动作点上应保持一致的手臂姿势。EPSON RC+5.0软件提供了用户友好的界面来设定手臂姿势,并通过点属性(J4Flag和J6Flag)进一步细化控制。
二、编程实践
2.2.1 在编程时,对垂直6轴型机械手的手臂姿势进行细致设定,确保在执行任务时按照预设的方式运动。通过使用编程指令,可以灵活地调整关节角度,但需要注意并非所有可能的组合都能实际应用,要根据具体任务需求选择合适的姿势。
三、软件界面与监控
EPSON机器人编程软件具备丰富的子画面,如菜单栏、工具栏、项目管理器等,提供直观的操作界面。状态窗口实时显示项目编译状态、系统错误、警告等信息,帮助开发者及时发现和解决问题。状态栏则显示关键操作模式、紧急停止状态、门禁状态、错误警告、任务运行状态以及代码行号等信息,确保编程和操作的安全性。
总结,爱普生机械手编程涉及到对坐标系的理解、手臂姿势的精准设定以及软件界面的高效利用。掌握这些要点,能够有效提升机械手的作业精度和生产效率,减少潜在问题,确保生产过程的顺利进行。同时,理解和遵循正确的编程规范,对于维护设备稳定性和延长使用寿命也至关重要。
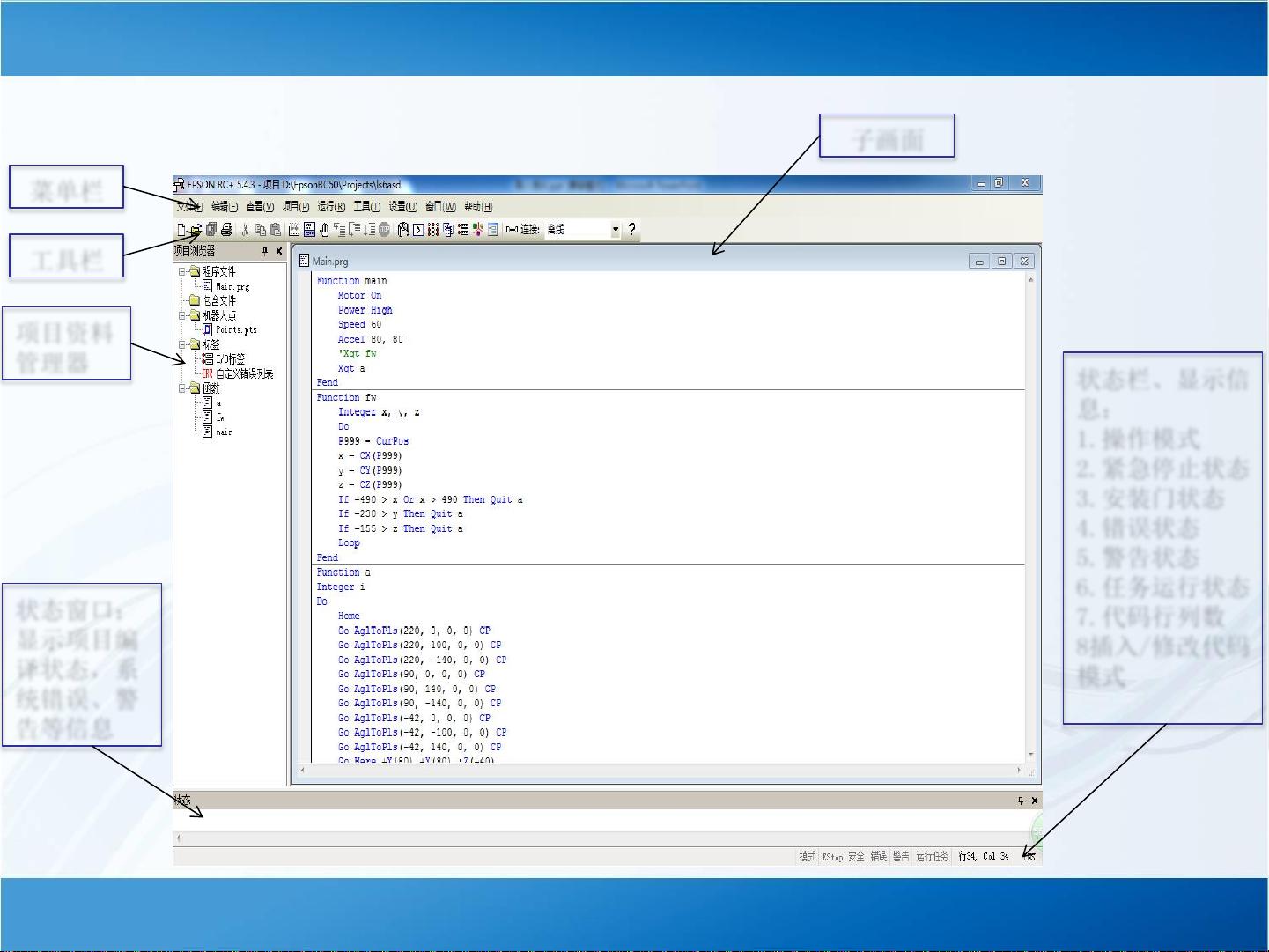
子画面
菜单栏
工具栏
项目资料
管理器
状态窗口:
显示项目编
译状态,系
统错误、警
告等信息
状态栏、显示信
息:
1.操作模式
2.紧急停止状态
3.安装门状态
4.错误状态
5.警告状态
6.任务运行状态
7.代码行列数
8插入/修改代码
模式
二、EPSONRC+用户界面

剩余37页未读,继续阅读
2018-12-22 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

qq_27566557
- 粉丝: 1
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
