ARM芯片控制的电脑鼠走迷宫技术解析
需积分: 19 8 浏览量
更新于2024-07-29
2
收藏 1.08MB PDF 举报
"这篇文档主要介绍了电脑鼠的设计与实现,这是一种基于微处理器的微型机器人,能够在迷宫中自主寻找最佳路径。文中详细讨论了电脑鼠的组成部分,包括微控制器、探测器和驱动机构,并提到了在项目中使用的硬件和软件平台。文章特别提到了采用ARM系列芯片作为控制系统,使用Crosswork作为开发工具。此外,还涉及到了IEEE标准电脑鼠走迷宫竞赛以及所使用的stellaris驱动库函数,该库函数以C语言编写,易于理解和应用。在编程环境中,采用了CrossWorks For ARM,这是一个针对ARM7微处理器的C语言开发系统,支持ARM GCC编译器、函数库和集成开发环境。最后,文中提到了具体的一款电脑鼠模型——MicroMouse102,它使用了LuminaryMicro公司的32位ARM Cortex-M3处理器LM3S102,负责处理传感器数据和控制电机驱动以导航迷宫。"
本文点涵盖以下几个方面:
1. **电脑鼠定义**:电脑鼠是一种由微处理器控制的智能机器人,具备感知、判断和行走能力,能在迷宫中寻找最优路径。
2. **系统构成**:电脑鼠主要包括微控制器(如ARM芯片)、前视距离探测器(眼睛)、车轮编码器(腿)等部分,这些组件协同工作以完成迷宫导航任务。
3. **技术平台**:使用Crosswork作为软件开发工具,基于ARM架构的微控制器进行设计和调试。
4. **竞赛背景**:提及了“IEEE标准电脑鼠走迷宫”竞赛,这是一个具有国际影响力的科技竞赛。
5. **驱动库和编程环境**:文章中使用了stellaris驱动库,基于C语言,且编程环境是CrossWorks For ARM,这为开发者提供了便利的开发和调试工具。
6. **具体实例**:MicroMouse102模型使用了LM3S102处理器,该处理器具有丰富的功能特性,包括对红外传感器的控制和电机驱动的管理。
这些知识点对于理解电脑鼠的设计原理、开发流程和技术实现具有重要的参考价值,同时也能为参加相关竞赛或进行微型机器人项目提供启示。
API函数的解析:
GPIOPinIntStatus():获取所选的GPIO端口的所有管脚的中断状态。返回一个位填充的字节,
在这个字节中置位的位同来识别一个有效的屏蔽或原始中断。
2.2.9红外检测电路
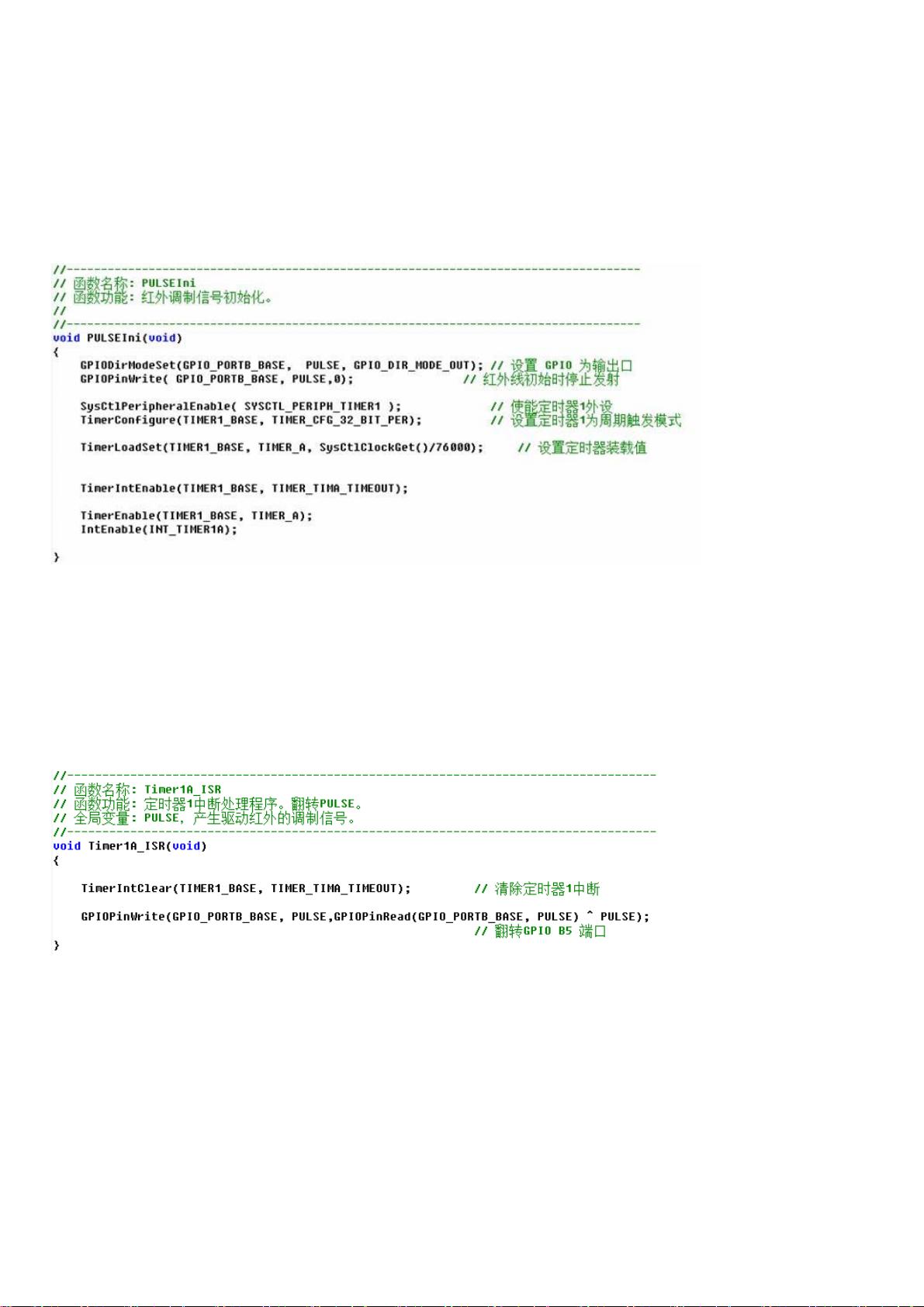
2.2.9.1调制红外信号
采用脉冲调制的反射式红外发射-接收传感器。考虑到环境干扰主要是直流分量,如果采
用带有交流分量的调制信号,在平均电流不变的情况下,瞬时电流可以很大,这样也大大提高
了信噪比,可以有效避免外界环境变化对系统检测精度的影响。
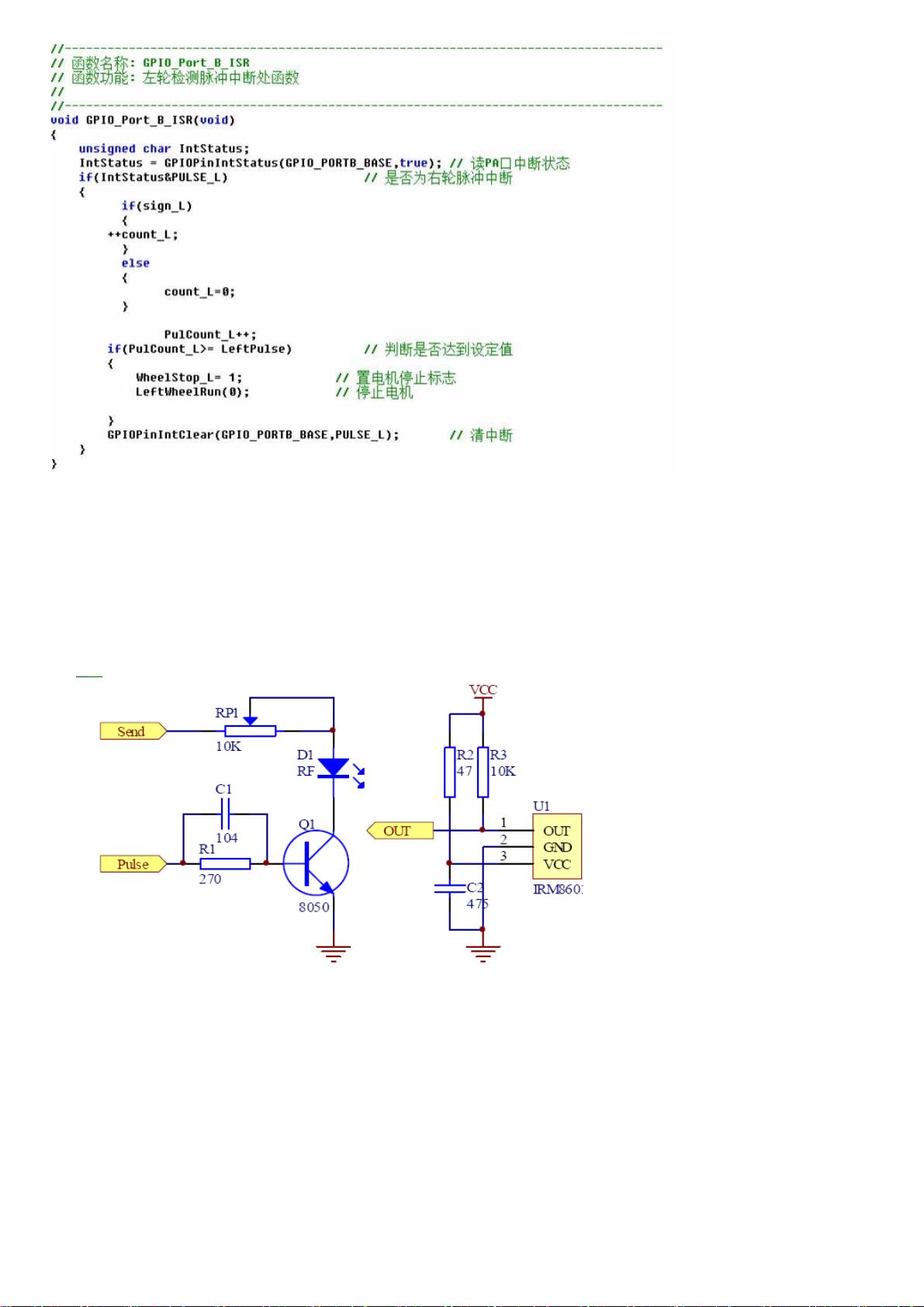
电路原理图如图2所示,由可调电阻R1,红外线发光管D1和三极管Q1构成的电路为红外
线发射电路。R1可以调节红外线发光管的发光强度,Q1起驱动作用。
图2
红外电路原理图
在接收电路中,U1为一体式红外线接收传感器IRM8601S,,它内部集成自动增益控制电
路、带通滤波电路、解码电路及输出驱动电路。但由于它是开漏输出,所以输出端需接一个上
拉电阻,见图2中的R3。其中R2是限流电阻,C1滤出电源高频干扰。
IRM8601S是一体式红外线接收传感器,它内部集成自动增益控制电路、带通滤波电路、
解码电路及输出驱动电路。当连续收到38KHz的红外线信号时,将产生脉宽10ms左右的
低电平。如果没有收到信号,便立即输出高电平。如图2.4所示,Pulse为发射控制端,高
电平时发射38KHz的红外信号。Out为接收输出端,低电平表示收到信号。
2.2.9.2用红外进行挡板检测
Micromouse中文名为“电脑鼠”,电脑鼠在迷宫中行进时是靠侦测路面情况前进的。
它的左右传感器不但要检测是否存在支路(没有挡板就是一条支路)还要避免和挡板碰触。
因此电脑鼠每一侧在正常情况就需要两组红外传感器,一组检测稍微远一点的距离,判断
是否存在支路,一组检测稍微近一点的距离,判断是否即将碰触挡板。如果是,则要进行微
2010-12-14 data.eefocus.com/upload/2008/g01/
data.eefocus.com/upload/2008/g01/ 6/32
剩余31页未读,继续阅读
点击了解资源详情
138 浏览量
点击了解资源详情
2011-04-30 上传
162 浏览量
124 浏览量
2022-09-21 上传
2022-09-23 上传

yuxuefly
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Adobe Flex 编码指南
- Eclipse中文图文教程
- Flex+Blazeds+Java+入门教程.doc
- See MIPS Run Linux(中文版)
- MyEclipse 6 Java EE 开发中文手册.pdf
- Log4j全面详细手册
- IBM DB2 Universal Database Command Reference
- C#语言概述******
- 敏捷开发java电子书
- QTP相关学习文档,对象识别
- Objective-C 开发手册
- Perl编程参考手册
- LabWindows/CVI基础教程
- C和C++语言经典、实用、趣味程序设计编程百例精解
- OPNET_用户指南_翻译稿
- mysql高性能第二版
