Autoware实战指南:从数据记录到车辆控制
需积分: 13 41 浏览量
更新于2024-07-14
1
收藏 8MB PDF 举报
"Autoware_TierIV_Academy_v1.1.pdf - 无人驾驶系统说明手册,涵盖了数据记录/播放、传感器校准、3D地图生成与定位、目标检测、交通灯检测、路径生成与规划以及路径跟踪和车辆控制等模块的实践教程。"
Autoware是一个开源的自动驾驶软件平台,旨在为全球开发者提供实现自动驾驶的核心技术。该手册的目的是为那些无法直接参加Autoware Academy的国际开发者提供指导。通过这份文档,你可以学习如何在实际操作中运用Autoware的各种功能。
在第一章“数据记录/播放与传感器校准”中,介绍了如何利用ROS(Robot Operating System)的ROSBag格式保存传感器数据。ROSBag是ROS中用于存储和回放传感器数据的文件格式,它允许用户记录机器人运行时的完整环境信息,包括激光雷达、摄像头和其他传感器的数据。回放ROSBag可以用于测试和调试,或者在没有真实硬件的情况下进行仿真。
第二章“3D地图生成与定位”讲解了如何创建三维地图以及如何实现车辆的精确定位。3D地图生成涉及到SLAM(Simultaneous Localization and Mapping)技术,用于构建环境的高精度模型。而定位则依赖于这些地图,结合传感器数据(如LiDAR和GPS)来确定车辆的实时位置。
第三章“对象检测与交通灯检测”涵盖了计算机视觉技术在自动驾驶中的应用。对象检测是识别和分类周围物体的关键,通常使用深度学习模型如YOLO或Faster R-CNN来实现。交通灯检测则是确保车辆能够正确识别并遵守交通规则的重要部分。
第四章“路径生成与路径规划”讨论了如何为车辆规划安全有效的行驶路线。路径生成涉及几何算法,如Dijkstra或A*算法,而路径规划则需要考虑到实时交通情况、障碍物规避和最优路径选择。
最后的第五章“路径跟踪与车辆控制”关注的是如何使车辆按照规划的路径行驶。这包括车辆的动态模型建模、控制器设计和反馈控制策略,以确保车辆能够在复杂环境中稳定、准确地行驶。
通过Autoware Hands-on Exercises,开发者可以逐步学习和实践这些关键技能,从而深入理解和掌握自动驾驶系统的各个组件和工作流程。同时,鼓励读者随着Autoware的新版本更新这份文档,以保持知识的最新性。
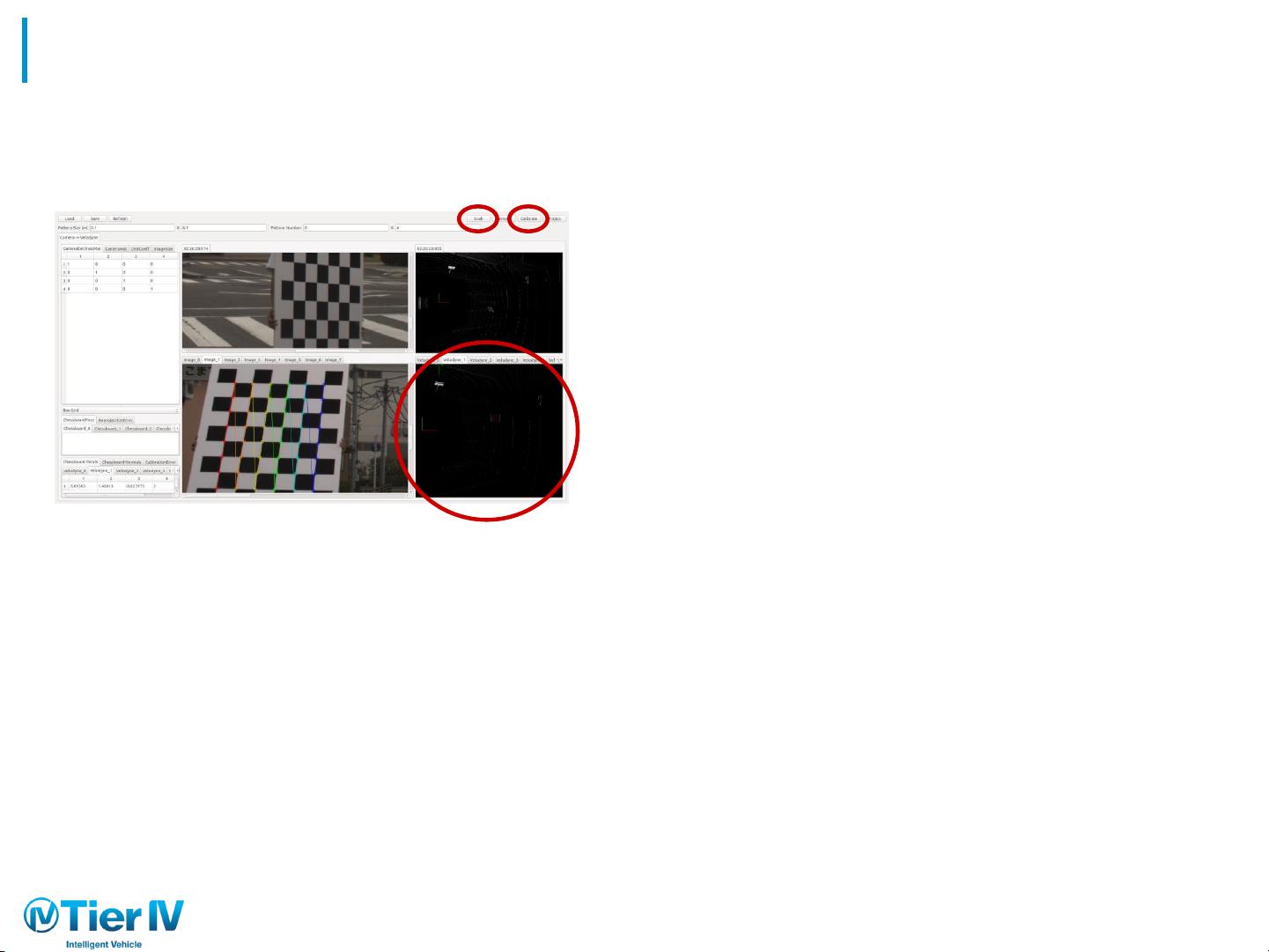
Sensor Calibration − Steps (3/4)
Autoware Hands-on Exercises
13
4. Press Grab to capture data from both
sensors
A) Confirm that a camera image (upper-left) and
LIDAR (upper-right) data are displayed, then
click [Grab] button
5. Select grabbed data points that are
projected on the checkerboard
A) Click LIDAR scan projected on the
checkerboard from the right-bottom window
Conduct this step as many times as the number of
grabbed frames.
6. Calibration
A) Click [Calibrate]
B) Confirm that the parameters of calibration are
updated on the table shown in the left
window
Run data grab and calibration
Move: ↑,↓,→,←,PgUp,PgDn
Rotate: a,d,w,s,q,e
Point size: o(decrease), p(increase)
Change background color: b


剩余73页未读,继续阅读
7352 浏览量
1535 浏览量
230 浏览量
227 浏览量
172 浏览量
354 浏览量
2025-02-07 上传
643 浏览量

ywfwyht
- 粉丝: 9834
 我的内容管理
展开
我的内容管理
展开







最新资源
- 32位TortoiseSVN_1.7.11版本下载指南
- Instant-gnuradio:打造定制化实时图像和虚拟机GNU无线电平台
- PHP源码工具PHProxy v0.5 b2:多技术项目源代码资源
- 最新版PotPlayer单文件播放器: 界面美观且功能全面
- Borland C++ 必备库文件清单与安装指南
- Java工程师招聘笔试题精选
- Copssh:Windows系统的安全远程管理工具
- 开源多平台DimReduction:生物信息学的维度缩减利器
- 探索Novate:基于Retrofit和RxJava的高效Android网络库
- 全面升级!最新仿挖片网源码与多样化电影网站模板发布
- 御剑1.5版新功能——SQL注入检测体验
- OSPF的LSA类型详解:网络协议学习必备
- Unity3D OBB下载插件:简化Android游戏分发流程
- Android网络编程封装教程:Retrofit2与Rxjava2实践
- Android Fragment切换实例教程与实践
- Cocos2d-x西游主题《黄金矿工》源码解析
