本文档详细探讨了基于单片机的四足机器人控制系统的设计,其核心目标是创建一个能够模仿四足动物运动、具有人工智能交互能力的机器人,以满足日益增长的陪伴需求和智能化家庭生活中的便利。以下是文章的主要知识点:
1. **设计背景**:
- 四足机器人设计的必要性和可行性分析:由于宠物狗和猫在现代生活中的重要性,以及它们所带来的陪伴和情感支持,四足机器人的应用潜力巨大。设计四足机器人旨在提供一种无需担心健康问题、无需太多照顾的陪伴选择,同时结合AI技术,如KODA狗那样具备多种感官交互和跟踪能力。
2. **设计要求**:
- 明确的外形设计:机器人外形设计成四足,关节间由舵机连接,确保灵活性和动态平衡。
- 平衡控制:利用单片机的 MPU 模块监测机器人是否平衡,一旦失衡,将通过内置程序自我调整。
- 预设功能:设计允许机器人执行预定义的动作,这显示了其在任务自动化方面的实用性。
3. **系统设计**:
- **系统总体设计**:涵盖了硬件和软件两大部分,强调了整体架构的规划。
- **硬件设计**:
- 单片机元器件选型:选择适合四足机器人运动控制和AI交互的高性能单片机。
- **系统主电路图**:展示了机器人的电气连接和信号传递路径,确保各部分协调工作。
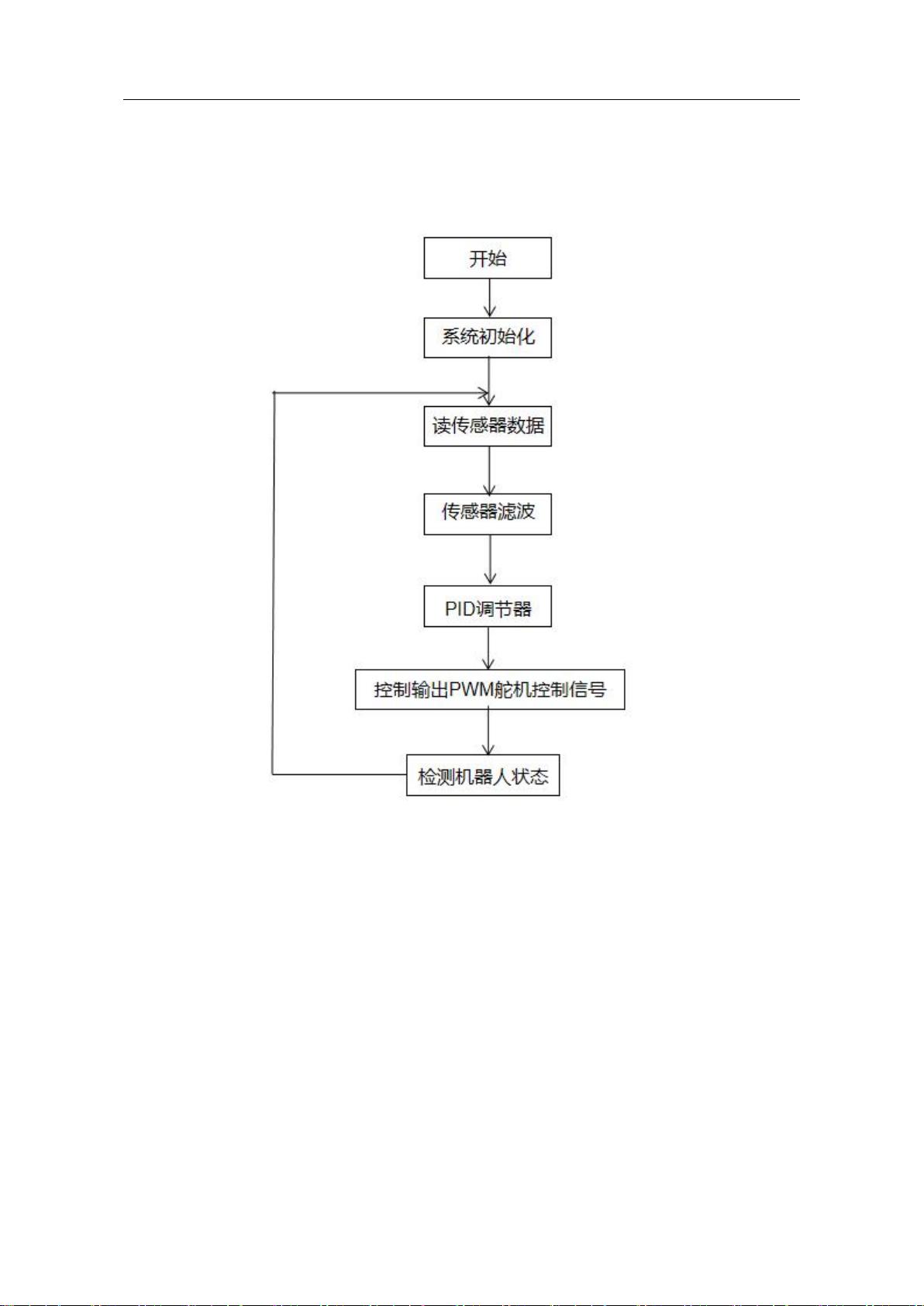
- **软件设计**:
- 编程软件介绍:可能涉及到开发环境的选择和编程语言的使用。
- 硬件模块流程图:展示了软件如何控制硬件组件,如舵机、传感器等。
4. **系统实施**:
- **系统仿真与调试**:涉及实际组装机器人,烧录预编程序,并在不同情境下测试其行动,如前进、搬运物体等。
- **单片机源代码**:提供关键代码示例,展示实际操作细节。
5. **总结**:文档结尾可能会总结整个设计过程,强调项目的技术挑战和成果,以及对未来可能改进的方向。
通过这篇文章,读者可以了解到基于单片机的四足机器人控制系统设计的具体策略和技术路径,以及如何通过人工智能技术提升机器人的互动性和实用性。这项设计不仅关注机器人的物理结构,更侧重于软件算法和智能交互的设计,展示了在现代科技背景下,如何将人工智能与传统控制技术相结合,创造出更具人性化的智能设备。