ROS完全参考手册:解析机器人操作系统核心技术
"ROS The Complete Reference Volume 1 是一本2016年出版的720页的专业书籍,专注于深入解析ROS(Robot Operating System)系统架构和原理,适合ROS的进阶学习者。"
ROS(机器人操作系统)是机器人技术领域的重要组成部分,它提供了一个综合的框架,使得机器人开发变得更加模块化和高效。这本书《ROS完全参考手册》第一卷,由Anis Koubaa编辑,是“Studies in Computational Intelligence”系列的一部分,旨在全面介绍ROS的核心概念、工具和实践应用。
书中可能涵盖以下几个关键知识点:
1. **ROS基础**:介绍ROS的核心概念,包括节点(Node)、话题(Topic)、服务(Service)、参数(Parameter Server)、包(Package)和工作空间(Workspace)等基本元素,以及它们如何协同工作来构建复杂的机器人系统。
2. **ROS架构**:探讨ROS的层次结构,包括启动流程、消息传递机制、文件系统布局,以及如何通过roscore、roslaunch等工具管理ROS环境。
3. **中间件与通信**:详细讲解ROS的中间件特性,如XML-RPC、ZeroMQ等,以及如何通过Topic和服务实现节点间的异步数据通信。
4. **传感器和执行器接口**:ROS提供了丰富的驱动程序库,如tf变换框架、相机标定工具、激光雷达和IMU等传感器的接口,以及如何编写自己的驱动程序。
5. **编程接口**:介绍ROS的主要编程语言接口,如C++和Python,包括常用API的使用方法,如ros::NodeHandle、ros::Publisher和ros::Subscriber等。
6. **导航与移动规划**:ROS中的navigation stack,包括全球路径规划、局部路径规划、避障策略以及移动机器人控制等。
7. **SLAM(Simultaneous Localization and Mapping)**:ROS中处理SLAM问题的库,如Gmapping、AMCL等,以及如何进行地图构建和定位。
8. **视觉和感知**:ROS在计算机视觉中的应用,如OpenCV接口,以及图像处理和目标检测的节点和包。
9. **开发和调试工具**:介绍rosbag、rqt、rviz等工具的使用,用于数据记录、可视化和调试。
10. **实战案例**:可能包含实际机器人项目或案例研究,展示如何在实际环境中应用ROS。
通过这本全面的参考手册,读者可以深入理解ROS的各个方面,从理论到实践,提升对机器人系统的整体把握和开发能力。对于希望在ROS上进行高级开发的工程师和研究人员来说,这本书无疑是宝贵的参考资料。

6 S. Chitta
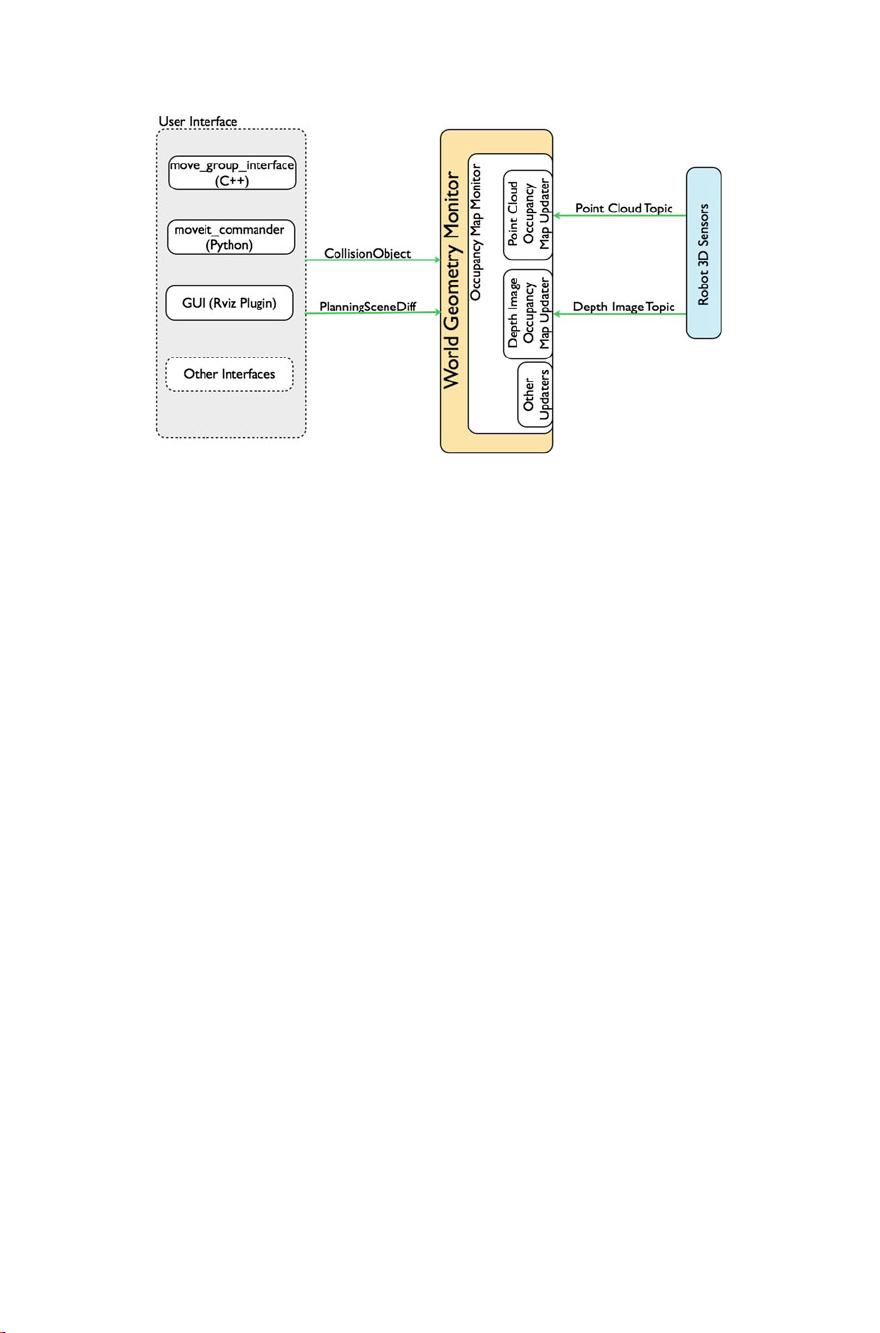
• In Python:usingthemoveit_commander package. This API is recommended for
scripting demos and for building applications.
• Through a GUI: using the Motion Planning plugin to Rviz (the ROS visualizer).
This API is recommended for visualization, initial interaction with robots through
MoveIt! and for quick demonstrations.
One of the primary design principles behind MoveIt! is to expose an easy to use
API for beginners to use while retaining access to t he entire underlying API for
more advanced users. MoveIt! users can access any part of the functionality directly
if desired, allowing custom users to modify and architect their own applications.
MoveIt! builds on several component technologies, each of which we will describe
in brief detail.
3.1 Collision Checking
MoveIt! relies on the FCL [3] package for native collision checking. The collision
checking capabilities are implemented using a plugin architecture, allowing any
collision checker to be integrated with MoveIt!. FCL provides a state of the art
implementation of collision checking, including the ability to do continuous collision
checking. Collision checking is often the most expensive part of motion planning,
consuming almost 80–90 % of the time for generating a motion plan. The use of an
Allowed Collision Matrix allows a user to specify which pairs of bodies do
not need to be checked against each other, saving significant time. The Allowed
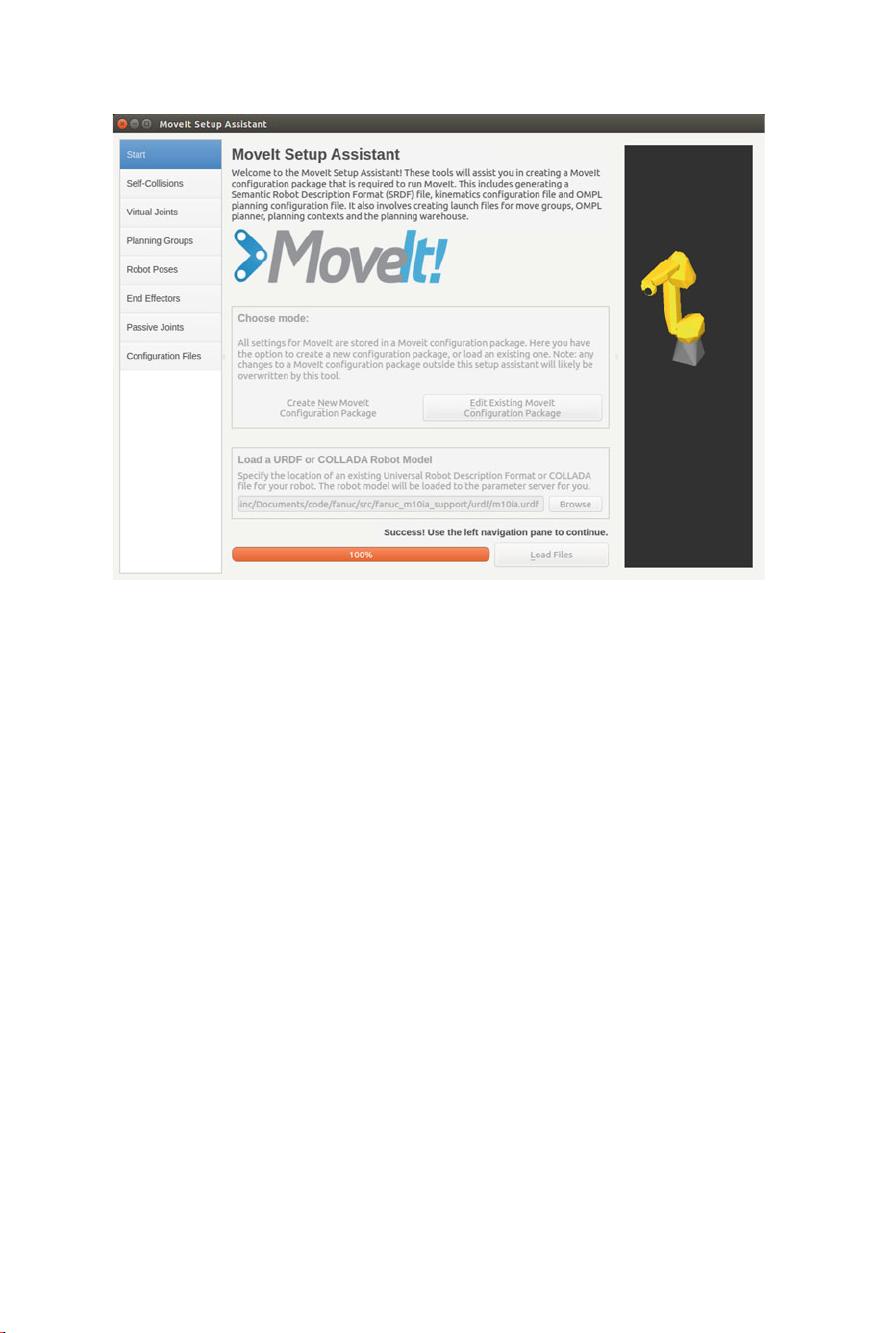
Collision Matrix is automatically configured by the MoveIt! Setup Assistant but
can also be modified online by the user.
3.2 Kinematics
MoveIt! utilizes a plugin-based architecture for solving inverse kinematics while
providing a native implementation of forward kinematics. Natively, MoveIt! uses a
numerical solver for inverse kinematics for any robot. Users are free to add their own
custom solvers, in particular analytic solvers are much faster than the native solver.
Examples of analytic solvers that are integrated with MoveIt! include the solver for
the PR2 robot. A popular plugin-based solver for MoveIt! is based on IKFast [4] and
offers analytic solvers for industrial arms that are generated (in code).
3.3 Motion Planning
MoveIt! works with motion planners through a plugin interface. This allows MoveIt!
to communicate with and use different motion planners from multiple libraries,

剩余719页未读,继续阅读
2018-12-17 上传
2018-12-17 上传
110 浏览量
2019-11-05 上传
2018-12-04 上传
2019-06-24 上传
2021-10-06 上传
点击了解资源详情

yonh_dee
- 粉丝: 1
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
