二维图形变换:齐次坐标与基本变换
需积分: 10 51 浏览量
更新于2024-08-02
收藏 353KB PPT 举报
"二维图形变换原理介绍,涉及齐次坐标、基本变换类型如恒等变换、比例变换和镜像变换在机械CAD/CAM技术中的应用。"
在计算机图形学中,二维图形变换是图形处理的核心概念之一,它涉及到如何通过数学运算改变图形的位置、大小和形状。本内容主要讲解了二维图形变换的基本原理,包括点的表示、变换矩阵以及齐次坐标系统。
首先,点在二维空间中的表示通常使用直角坐标系 (X, Y) 来描述,也可以表示为矩阵形式 [x, y] 或 [x/y]。在图形变换中,这些点的位置向量是基础元素。
其次,变换矩阵是实现图形变换的关键工具。一个点 P 经过变换后成为点 P',可以通过点 P 的位置向量与2×2的变换矩阵 T 相乘来得到。例如,新点 P' 的坐标可以用矩阵表达式 P' = TP 表示,其中 T 的元素 A, B, C, D 决定了变换的具体性质。
接着,引入了齐次坐标系统,这是一种扩展坐标表示法,使用 N+1 维向量表示 N 维向量。在二维空间中,点 (X, Y) 可以用 (X, Y, H) 来表示,H 是非零常量,通常取 H=1。这样,齐次坐标 (X, Y, 1) 能够包容笛卡尔坐标系中的点 (X, Y)。在齐次坐标下,原本的2×2变换矩阵扩展为3×3矩阵,以适应额外的坐标分量。
然后,讨论了三种基本的二维图形变换类型:
1. 恒等变换:保持点的位置不变,变换矩阵为单位矩阵,即所有对角线元素为1,非对角线元素为0,表示 x'=x, y'=y。
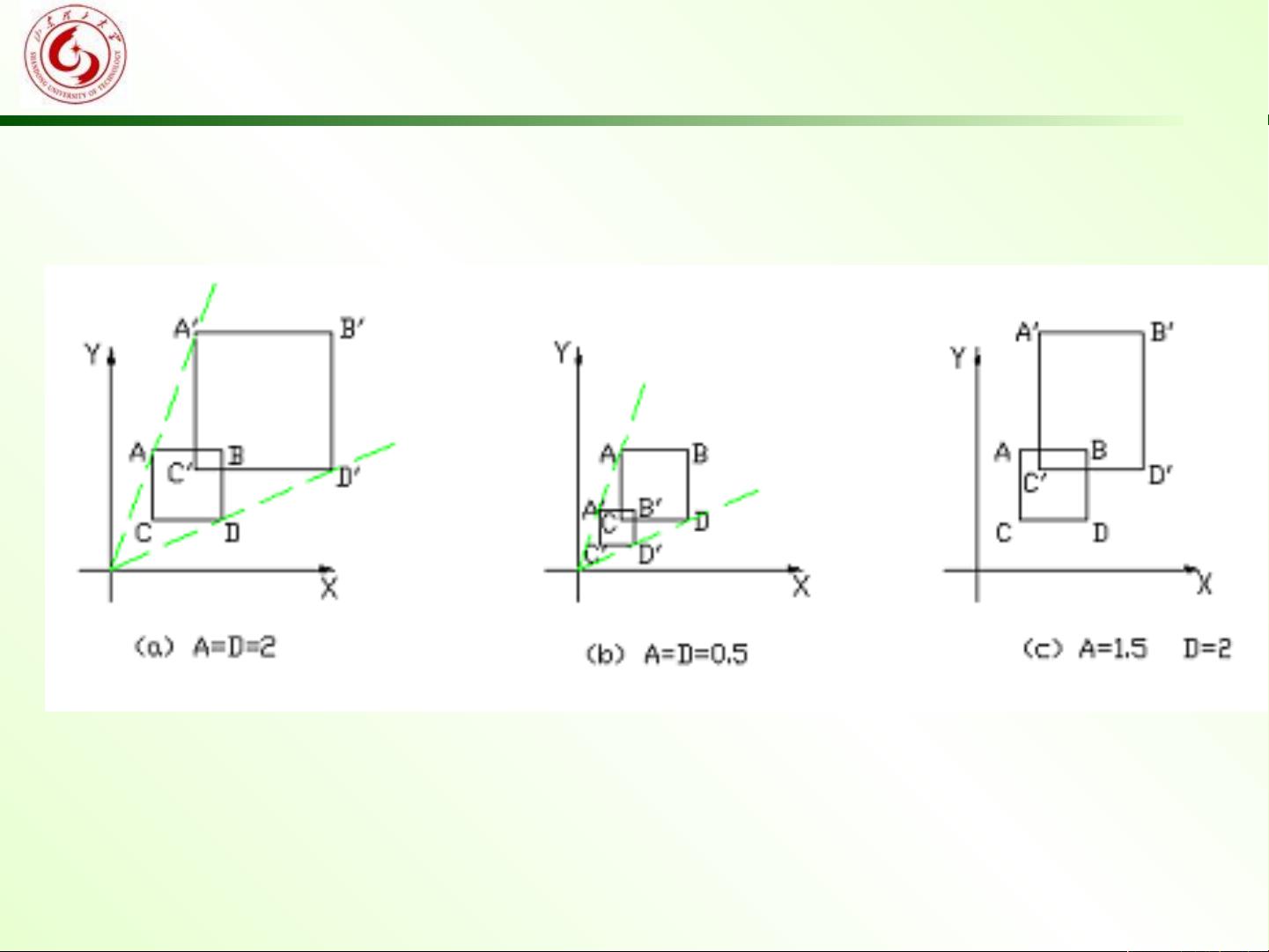
2. 比例变换:点按与原点的距离比例放大或缩小,变换矩阵形式为 [A, 0; 0, D],其中 A 和 D 是比例因子。当 A 和 D 大于0且相等时,图形等比例放大或缩小;当 A 或 D 为负值时,图形会沿相应的轴翻转。
3. 镜像变换(对称反射变换):当变换矩阵的某些元素为负值时,可以实现关于X轴、Y轴或原点的对称变换。例如,当 A=D=-1 时,点将关于原点对称。
这些基本变换类型是构建复杂图形变换的基础,它们可以组合使用,形成复合变换,以实现更丰富的图形操作。例如,通过组合比例变换和镜像变换,可以创建出各种对称图案和图形变形效果。在机械CAD/CAM技术中,这些变换被广泛应用于设计和模拟机械部件的运动、形状修改等方面,是计算机辅助设计不可或缺的一部分。
10
下图为比例变换的几种情况。
剩余54页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2012-12-28 上传
2022-02-09 上传
2010-09-03 上传
2009-05-02 上传
2021-10-10 上传
2010-09-10 上传

pw2005105211
- 粉丝: 2
- 资源: 17
 我的内容管理
展开
我的内容管理
展开







最新资源
- PythonLLVM:基于py2llvm的python的LLVM编译器
- 迷宫搜索游戏应用程序:简单的搜索视频游戏应用程序
- TaskTrackerApp
- DYL EXPRESS 中马集运仓-crx插件
- Security题库.zip
- Clip2VO:CA-Visual Object的Clipper兼容性库-开源
- 365步数运动宝v4.1.84
- ruscello:打字稿中的redux + react-redux
- Roman-Shchorba-KB20:ЛабораторніроботизДД“Базовіметодологіїтатехнологіїпрограмування”студентаакаееггрупиКІ
- PCAPFileAnalyzer:分析 PCAP 网络捕获文件
- 西安市完整矢量shp数据
- 泽邦集运代购和代运助手-crx插件
- python的tkinter库实现sqlite3数据库连接和操作样例源代码
- VC++2010学生版(离线安装包)
- basic-webpage
- flx:Emacs的模糊匹配...崇高的文字
