
7
Tag Identication Protocols in RFID Systems
Slotted Aloha
The main problem that limits the reading rate of
Pure Aloha systems is partial collisions.
In Slotted Aloha, the time is assumed to be
slotted and all tags have a local clock for synchro-
nization. A time slot is a time interval in which tags
transmit their ID, and collisions can occur only at
slot boundary, i.e. there are not partial collisions.
Instead of replying on a continuous timeline, tags
are required to respond at pre-defined slots. When
a collision occurs, the involved tag waits for a
random number of slots before retransmitting. The
maximum throughput of Slotted Aloha protocols
is around 36%. This performance gain is due to
the fact that collisions only occur at the start of
each slot as opposed to any time in Pure Aloha.
As in Pure Aloha, there are many optimizations
(Bolic et al. 2010):
• Slotted Aloha with Muting or Slow
Down. This variant has the same operat-
ing principle as Pure Aloha with muting
or slow down, but it operates in a slotted
manner.
• Slotted Aloha with Early End. A reader
closes a slot if it does not detect any trans-
mission at the beginning of a slot. Two
commands are used: start-of-frame (SOF)
and end-of-frame (EOF). The former is
used to start a reading cycle, and the latter
is used by the reader to close an idle slot
early. As a result, tags can transmit sooner,
leading to a higher reading rate. Moreover,
a reader is able to conserve energy as it can
start receiving the next reply sooner.
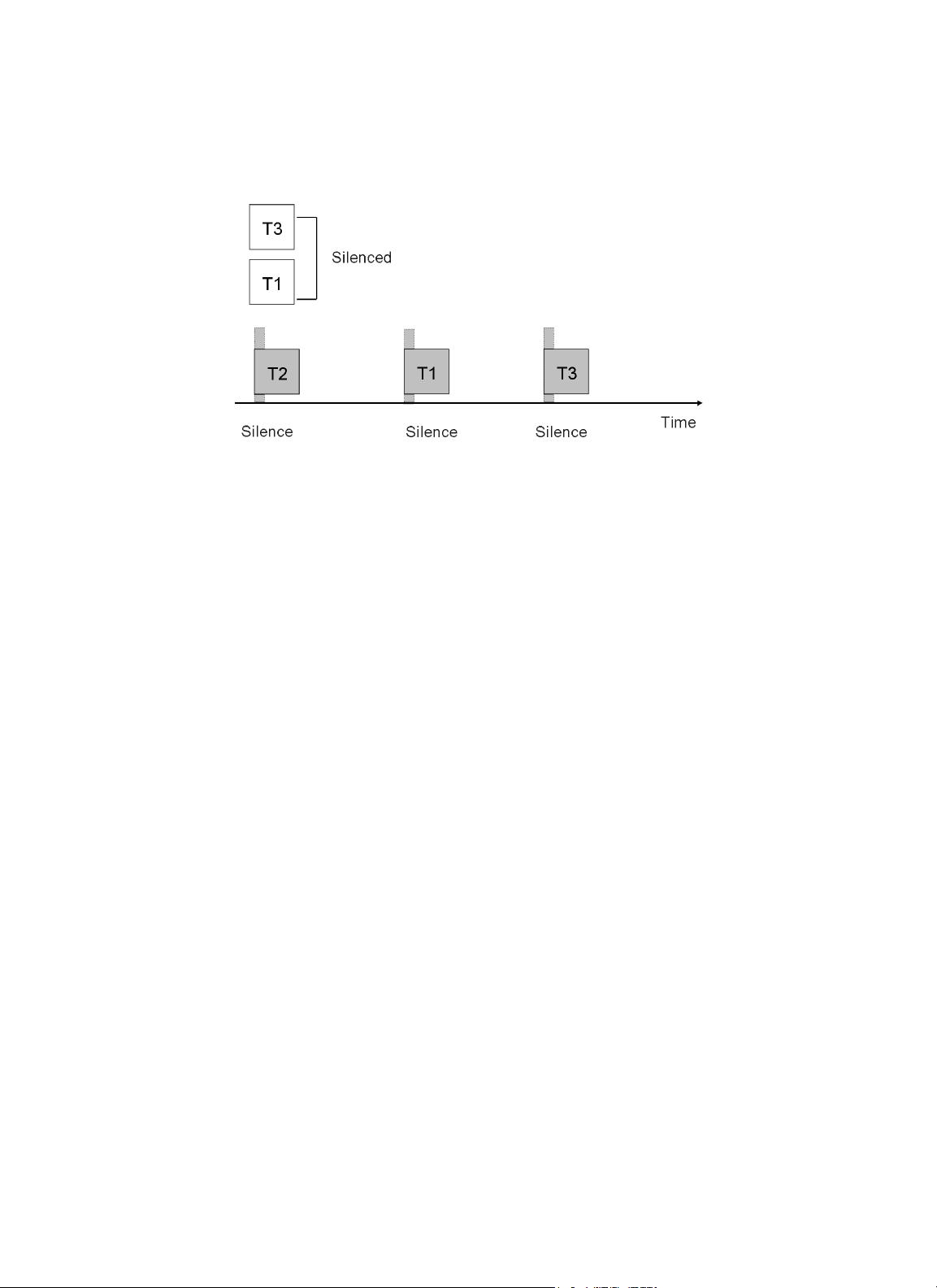
• Slotted Aloha with Early End and
Muting. After identifying a tag, the reader
sends a mute command to the tag, remov-
ing the tag from contending in subsequent
slots. In addition, idles slots are closed ear-
ly using EOF command.
• Slotted Aloha with Slow Down and Early
End. This variant combines slow down
with the early end feature. In other words,
as well as closing idle slots, identied tags
are instructed to slow their replies.
Basic Framed Slotted Aloha
To further improve the Slotted Aloha performance,
a variant has been introduced (Schoute 1983),
that we call Basic Framed Slotted Aloha (BFSA):
slots are arranged in frames, and a tag can select
only one slot in a frame for its transmission. The
frame length is set, known by all tags, and remains
unchanged for the entire protocol execution. Each
tag randomly selects a slot in a frame for its trans-
mission: if there is no collision, the reader sends
an acknowledgement to the tag, which becomes
Figure 4. Pure Aloha with fast mode (Bolic et al. 2010).

剩余308页未读,继续阅读

shancjb
- 粉丝: 0
- 资源: 24
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


