4-UPU并联机器人:空间运动学与应用特性
需积分: 9 67 浏览量
更新于2024-08-26
1
收藏 327KB PDF 举报
本文主要探讨了一种创新的空间4-UPU并联机器人机构模型,该机构能够实现三维空间移动和绕Z轴的旋转,这对于提升机械系统的灵活性和多功能性具有重要意义。作者赵铁石、陈江、王家春和黄真在2005年的《中国机械工程》第16卷第22期上发表了这项研究成果。
文章首先通过螺旋理论深入分析了4-UPU并联机器人机构的运动学原理,这种理论是理解机器人如何执行特定运动的关键。通过对机构自由度的计算,作者揭示了该结构的运动特性,确保了输入关节的选择是合理的,避免了不必要的复杂性或限制。
接下来,作者详细阐述了该机构的位置反解方法,即如何从给定的输入参数推算出机器人的实际位置。他们进一步导出了一个封闭形式的位姿正解方程,并通过数值验证来证实了这些方程的准确性。这为设计和控制该机构的实际应用提供了关键的数学工具。
讨论部分着重于机构的工作空间,即它能够达到的所有可能位置和姿态组合,这对于机器人应用的性能评估至关重要。此外,还对机构的奇异位形进行了分析,奇异位形是指机器人在某些特殊情况下(如关节角度接近极限)可能会出现的问题,理解这些问题有助于优化设计和避免潜在的机械故障。
由于4-UPU并联机器人机构是一种过约束机构,这意味着它拥有额外的自由度,这带来了结构对称性和相对简单的特性,使得它在制造成本和易用性方面具有优势。这种机构可以用于开发各种高性能设备,如新型工作台,具有高精度的并联机床,甚至四维力传感器和微操作机器人等,这些领域对于精密制造和科研实验具有广泛的应用前景。
这篇论文不仅提供了关于4-UPU并联机器人机构的深入理论分析,还为其实现精确控制和高效操作提供了实用的设计指导,为机械工程领域的技术创新和发展做出了重要贡献。
中国机械工程第
16
卷第
22
期
2005
年
11
月下半月
4
UPU
并联机器人机构及其运动学
赵铁石陈江王家春黄真
燕山大学,秦皇岛,
066004
摘要:提出了一种能实现空间三维移动和绕
Z
轴转动的机构模型一一-空间
4-UPU
并联
机器人机构模型。采用螺旋理论分析了
4-UPU
并联机器人机构实现空间三移一转运动的
机构学原理,计算了其自由度,讨论了输入的合理性;给出了其位直反解的方法,导出了位直正
解的封闭方程,进行了数值验证,并分析了该机构的工作空间和奇异位形。该机构是一种过约
束机构,具有结构对称且相对简单、刚皮大等优点,可用于开发新型工作台、并联机床、四维力
传感器以及微操作机器人等。
关键词:并联机构;运动学;奇异位形;工作空间
中图分类号:
TH112
文章编号:
1004-132
X
(2005)22
一
2034-05
4 •
UPU
Para
Il
el
Manipulator
Mechanism
and
Kinematics
Zhao
Tieshi
Chen
Jiang
明
T
ang
Jiachun
Huang
Zhen
Yanshan
University
,
Qinhuangdao
,
066004
Abstract:
A nove1
4-UPU
paralle1
manipu1ator
mechanism
that
can
perform
three-dimensiona1
trans1ations
and
rotation
about
Z
axis
was
presented.
The
princip1es
that
the
mechanism
can
perform
the
above
motions
were
ana1yzed
based
on
screw
theory
,
the
mobility
of
mechanism
was
calcu1ated,
and
the
rationa1ity
of
chosen
input
joints
was
discussed.
The
forward
and
inverse
position
kinematics
sol
utions
of
the
mechanism
and
corresponding
numerica1
examp1es
were
given
,
the
workspace
and
the
singu1arity
of
the
paralle1
mechanism
were
discussed.
The
mechanism
having
the
advantages
of
simp1e
symmetric
structure
and
1arge
stiffness
can
be
app1ied
to
the
developments
of
NC
paralle1
p1atforms
,
paralle1
machine
too1s ,
four-
dimensiona1
force
sensors
and
micro-
positiona1 paralle1
manipu1ators.
Key
words:
paralle1
manipu1ator;
kinematics;
singu1arity
configuration;
workspace
O
引言
自上个世纪
80
年代以来,并联机器人由于具
有刚度质量比大、输入误差不累积和承载能力高等
特点,而成为国际上机器人学研究热点领域之
-1·
飞近年来,少自由度并联机构成为机器人技
术中研究的新热点。与六自由度并联机器人相比,
少自由度并联机器人具有结构简单,造价低等特
点,因此,在工业生产及其他领域有着广阔的应用
前景。文献
[3~8J
对少自由度并联机器人机构进
行了研究。但是,由于大多数少自由度并联机构中
存在过约束和自由度桐合等现象,所以这类并联机
构的运动学分析较复杂,运动规律难以直观判别。
本文提出了一种能实现空间三维移动和绕
Z
轴转动的并联机器人机构模型
空间
4-UPU
并联机构模型。
1
4-UPU
并联机构结构特点
1.
1
结构与约束特征
4-UPU
机构模型及其坐标系的建立如图
1
收稿日期
:2005
01
31
基金项目·国家自然科学基金资助项目
(50375134)
;河北省博士
基金资助项目(
13200322
1)
• 2034 •
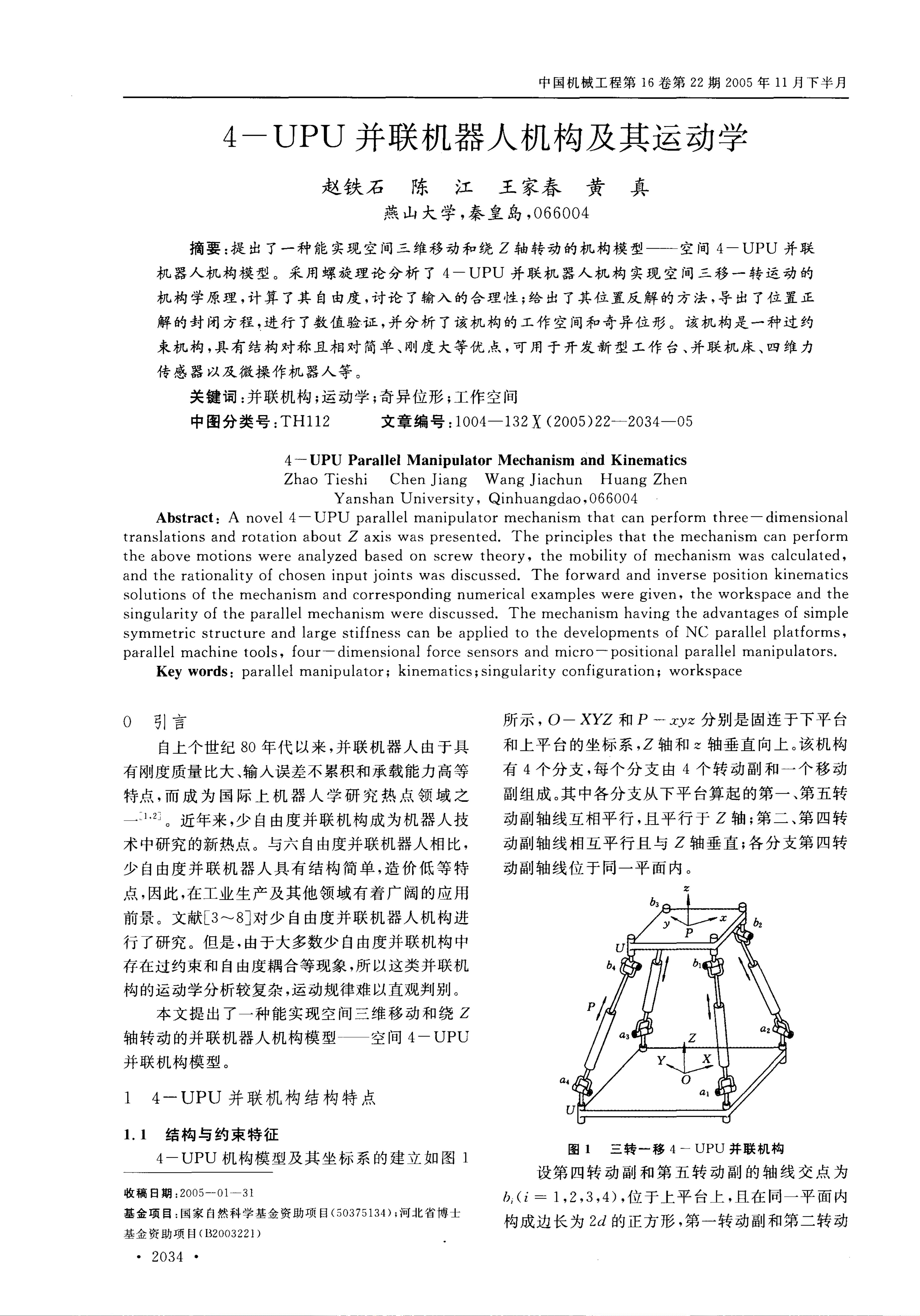
所示
,
O-XYZ
和
P-xyz
分别是固连于下平台
和上平台的坐标系,
Z
轴和
z
轴垂直向上。该机构
有
4
个分支,每个分支由
4
个转动副和一个移动
副组成。其中各分支从下平台算起的第一、第五转
动副轴线互相平行,且平行于
Z
轴;第二、第四转
动副轴线相互平行且与
Z
轴垂直;各分支第四转
动副轴线位于同一平面内。
b,
b,
Z
Y
aj
图
1
三转一移
4-UPU
并联机构
设第四转动副和第五转动副的轴线交点为
b;
(i
=
1
,
2
,
3
,的,位于上平台上,且在同一平面内
构成边长为
2d
的正方形,第一转动副和第二转动
下载后可阅读完整内容,剩余4页未读,立即下载
2021-06-27 上传
2021-10-03 上传
2021-06-19 上传
2024-10-27 上传
2023-09-30 上传
2024-10-27 上传
2024-10-27 上传
2024-10-27 上传
2023-02-14 上传

weixin_38687904
- 粉丝: 8
- 资源: 920
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
