番茄收获机器人技术现状与展望
需积分: 10 5 浏览量
更新于2024-09-06
收藏 210KB PDF 举报
"这篇论文详细探讨了番茄收获机器人技术的研究进展,涵盖了机器人系统组成、各部件功能、工作原理以及未来发展方向。文中指出,番茄收获机器人主要用于番茄的采摘,分为移动式和固定式两种类型,适应不同的栽培方式。机器人通常包括机械手、末端执行器、视觉系统、行走装置(对于移动式)和控制系统。这些组件协同工作,通过识别番茄的物理特性,如大小、颜色和位置,实现精确采摘。此外,论文还强调了农业机器人在解决劳动力短缺、提高工作效率和减轻劳动强度方面的意义。尽管农业机器人尚未普及,但随着技术的进步,它们在设施农业中的应用将更加广泛。"
本文首先介绍了番茄收获机器人的基本概念,即这类机器人属于机械手系列,设计用于不同番茄栽培模式下的采摘作业。目前研发的机器人主要分为移动式和固定式,两者都包含机械手、末端执行器、视觉系统和控制系统。移动式机器人还额外配备了行走装置,以便在田间移动。固定式机器人则适用于可以移动的植物生长系统,因此无需行走装置。
接着,论文强调了番茄的物理特性对机器人设计的影响,例如果实的数量、大小和颜色,这些都是机器人进行识别和采摘时需要考虑的关键因素。视觉系统在这一过程中扮演了重要角色,通过图像处理技术来检测和定位番茄,确保采摘的准确性和效率。
在讨论各组成部分时,机械手和末端执行器负责抓住并采摘番茄,需要具备足够的柔韧性和精确度,以避免损伤果实或植株。视觉系统则通过摄像头和图像处理算法来识别番茄,辅助机械手进行操作。控制系统协调所有部件的运动,根据实时数据调整采摘策略。
此外,论文还提到了番茄收获机器人技术的发展趋势,包括提高通用性,以适应不同种类的番茄;增强可靠性,减少故障率;提升工作效率,以满足大规模生产的需要;以及优化采摘质量,保证果实的新鲜度和完整性。这些目标的实现依赖于机械手性能的提升和智能控制策略的发展。
这篇论文提供了关于番茄收获机器人技术的全面概述,揭示了这一领域的最新研究成果和挑战,对于理解现代农业机械化和智能化的发展方向具有重要参考价值。随着科技的不断进步,农业机器人将在未来的农业生产中发挥更大的作用。
2003年 10月 农 机 化 研 究 第 4期
番 茄 收 获 机 器 人 技 术 研 究 进 展
‘
梁喜 凤 ,苗 香 雯 ,崔 绍 荣 ,王 永 维
(浙 江 大 学 生 物 系 统 工 程 与 食 品 科 学 学 院 ,浙 江 杭 州 310029)
【摘 要1 简述 了 番 茄 收 获 机 器 人 系 统 组 成 和 技 术 研 究 进 展 ,分 析 了 各 组 成 部 分 的 功 能 与 工 作 原 理 , 并 对
番 茄 收 获 机 器 人 通 用 性 、可 靠 性 、 工 作 效 率 、采摘 质 量 与 机 械 手 性 能 等 方 面 的 发 展 进 行 了 探 讨 。
【关 键 词 】 农 业 工 程 ; 番 茄 ;评 论 ;收 获 机 器 人
【中 图 分 类 号 】 ¥225;TP242.6 【文 献 标 识 码 】 A 【文 章 编 号 】 1OO3— 188X(2003)04-- 0001一 O4
l962.年 , 世 界 上 第 一 台 _T 业 机 器 人 在 美 国 问
世 ,随 着 高 科 技 的 发 展 与 机 械 、 电子 技 术 的 紧 密 结
合 ,机 器 人 技 术 已 广 泛 渗 透 于 各 个 领 域 。 日本 是 机
器 人 技 术 发 展 最 快 、应 用 最 多 的 国 家 , 其 产 量 约 占
世 界 总 拥 有 量 的 60%[1]。 在 农 业 机 器 人 的 研 究 方
面 ,日本 仍 居 世 界 各 国 之 首 ,目前 已经 研 制 出 番 茄 、
黄 瓜 、 葡 萄 、柑 桔 等 水 果 和 蔬 菜 收 获 机 器 人 。该 类
研 究 与 应 用 在 美 国 、 欧 洲 和 以 色列 等 也 均 有 报 导 。
农 业 机 器 人 由 于 其 技 术 和 经 济 方 面 的 特 殊 性 ,仍 没
有 普 及 和 商 品 化 【2]。机 器 人 应 用 于 农 业 生 产 中 , 特
别 是 设 施 农 业 生 产 过 程 ,是 农 业 向 自动 化 和 智 能 化
发 展 的 标 志 。 2l 世 纪 ,农 业 劳 动 力 将 逐 渐 向 社 会
其 它 产 业 转 移 , 世 界 各 国 面 临 着 人 口 老 化 问 题 ,劳
动 力 不 足 将 逐 渐 变 为 现 实 ,更 重 要 的 是 温 室 内 环 境
舒 适 度 较 差 ,收 获 作 业 劳 动 强 度 大 ,研 究 农 业 机 器
人 ,特 别 是 果 实 收 获 机 器 人 具 有 重 要 意 义 。
1 番 茄 收 获 机 器 人 类 型 与 结 构 组 成
番 茄 收 获 机 器 人 属 于 机 械 手 系 列 。基 于 不 同 的
番 茄 栽 培 方 式 , 目前 已 经 研 制 出 移 动 式 和 固 定 式 两
种 类 型 的 番 茄 收 获 机 器 人 。 移 动 式 番 茄 收 获 机 器 人
用 于 普 通 栽 培 方 式 的 番 茄 采 摘 , 主 要 由 机 械 手 、末
端 执 行 器 、 视 觉 系 统 、行 走 装 置 和控 制 系 统 5部 分
组 成 。 固 定 式 番 茄 收 获 机 器 人 主 要 基 于 植 株 可 以 移
动 的 生 产 系 统 研 制 的 ,它 有 固 定 的 工 作 位 置 ,不 需
要 行 走 装 置 , 由机 械 手 、末 端 执 行 器 、视 觉 系 统 和
控 制 系 统 4部 分 组 成 [3]。 番 茄 收 获 机 器 人 是 多 用 途
机 器 人 ,通 过 改 变 末 端 执 行 器 与 控 制 程 序 , 不 仅 可
以 采 摘 普 通 大 番 茄 , 还 可 以 采 摘 樱 桃 番 茄 。
2 番 茄 收 获 机 器 人 各 组 成 部 分 功 能 与 原 理
2.1 番 茄 的 物 理 特 性
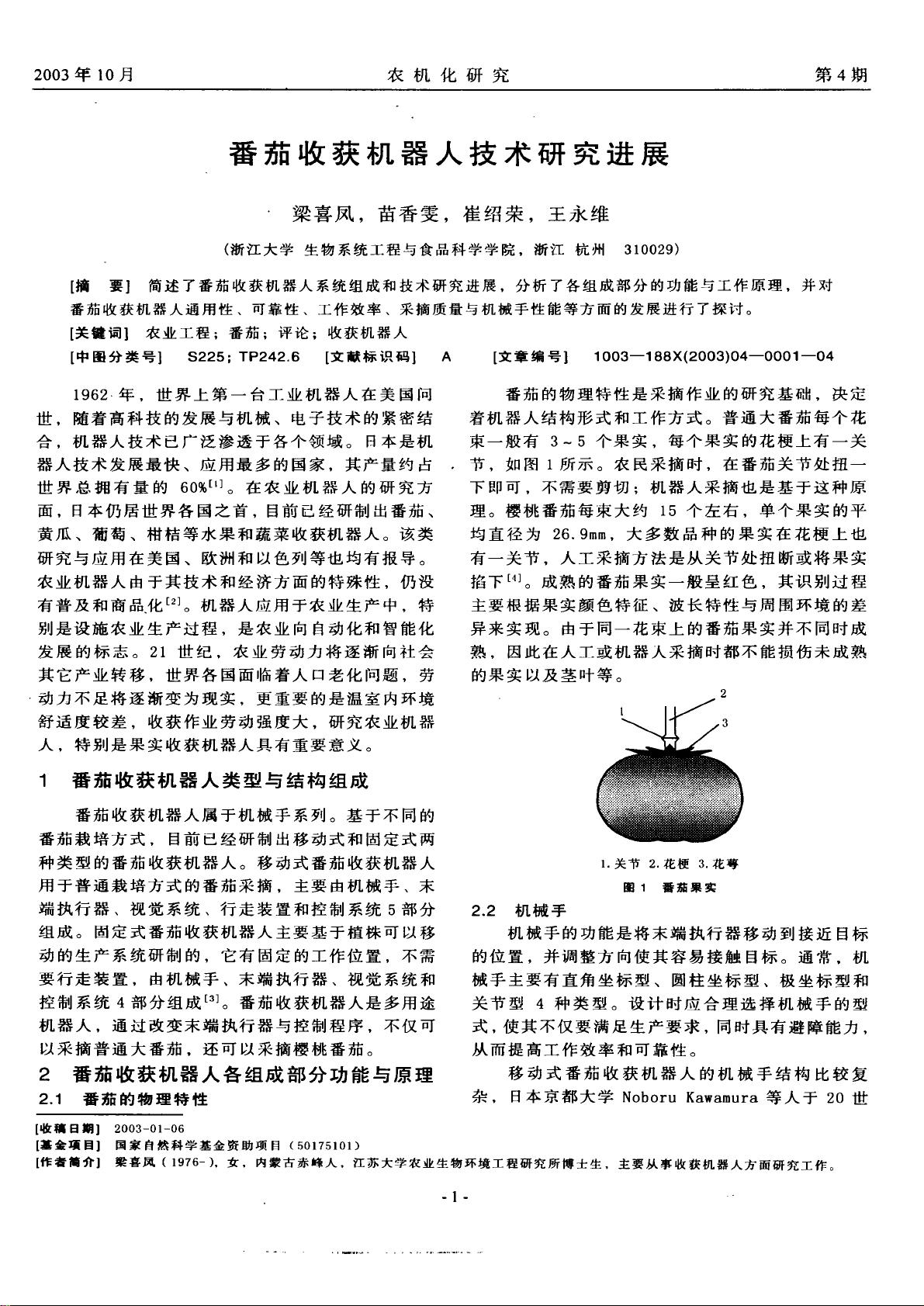
番 茄 的 物 理 特 性 是 采 摘 作 业 的 研 究 基 础 ,决 定
着 机 器 人 结 构 形 式 和 工 作 方 式 。 普 通 大 番 茄 每 个 花
束 一 般 有 3~5 个 果 实 ,每 个 果 实 的 花 梗 上 有 一 关
.
节 ,如 图 1所 示 。 农 民 采 摘 时 ,在 番 茄 关 节 处 扭 一
下 即 可 ,不 需 要 剪 切 ;机 器 人 采 摘 也 是 基 于 这 种 原
理 。 樱 桃 番 茄 每 柬 大 约 15 个 左 右 , 单 个 果 实 的 平
均 直 径 为 26.9mm, 大 多 数 品 种 的 果 实 在 花 梗 上 也
有 一 关 节 ,人 工 采摘 方 法是 从 关 节 处 扭 断或 将 果实
掐 下 H]。 成 熟 的 番 茄 果 实 一 般 呈 红 色 , 其 识 别 过 程
主 要 根 据 果 实 颜 色 特 征 、波 长 特 性 与 周 围 环 境 的 差
异 来 实 现 。 由 于 同 一 花 束 上 的 番 茄 果 实 并 不 同 时 成
熟 , 因 此 在 人 工 或 机 器 人 采 摘 时 都 不 能 损 伤 未 成 熟
的 果 实 以 及 茎 叶 等 。
2
1.关 节 2.花 梗 3.花 萼
图 1 番 茄 果 实
2.2 机 械 手
机 械 手 的 功 能 是 将 末 端 执 行 器 移 动 到 接 近 目标
的位置 ,并 调 整 方 向 使 其容 易 接触 目标 。 通 常 , 机
械 手 主 要 有 直 角 坐 标 型 、 圆 柱 坐 标 型 、 极 坐 标 型 和
关 节 型 4 种 类 型 。 设 计 时 应 合 理 选 择 机 械 手 的 型
式 ,使 其 不 仅 要 满 足生 产 要 求 ,同 时 具 有避 障能 力 ,
从 而 提 高 工 作 效 率 和 可 靠 性 。
移 动 式 番 茄 收 获 机 器 人 的 机 械 手 结 构 比 较 复
杂 , 日本 京 都 大 学 Noboru Kawamura 等 人 于 20世
【收 疆 日 期 】 2003—0卜06
【基 金 项 目 】 国 家 自 然 科 学 基 金 资 助 项 目 (50175101)
【作 者 简 介 】 梁 喜 凤 (1976一),女 , 内蒙 古 赤 峰 人 ,江 苏 大学 农 业 生 物 环 境 工 程 研 究 所 博 士生 ,主 要 从 事 收 获 机 器 人 方 面 研 究 工 作 。
维普资讯 http://www.cqvip.com
下载后可阅读完整内容,剩余3页未读,立即下载
2021-08-13 上传
2019-09-21 上传
2021-08-14 上传
2021-09-28 上传
2021-08-14 上传
2021-09-28 上传
2021-08-14 上传
2024-03-31 上传
2021-08-14 上传

weixin_38743968
- 粉丝: 404
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
