超声波测距系统设计与AT89C51应用详解
108 浏览量
更新于2024-08-29
收藏 232KB PDF 举报
基于超声波传感器的测距系统设计是一项针对移动机器人安全避障需求的关键技术。超声波传感器因其易于处理、成本效益高和硬件实现便捷,成为测距传感器的首选。本文选用的是SensComp公司的Polaroid6500系列超声波距离模块和600系列传感器,以及ATMEL公司的AT89C51作为微处理器。
超声波测距原理基于渡越时间法(Time of Flight, TOF),通过测量超声波从发射到接收到障碍物反射回的总时间,然后利用超声波在空气中的传播速度(通常取343米/秒)计算出物体的距离。这个过程涉及两个主要步骤:首先发送超声脉冲,然后接收并解析回波信号。
硬件电路设计的核心包括三个部分:
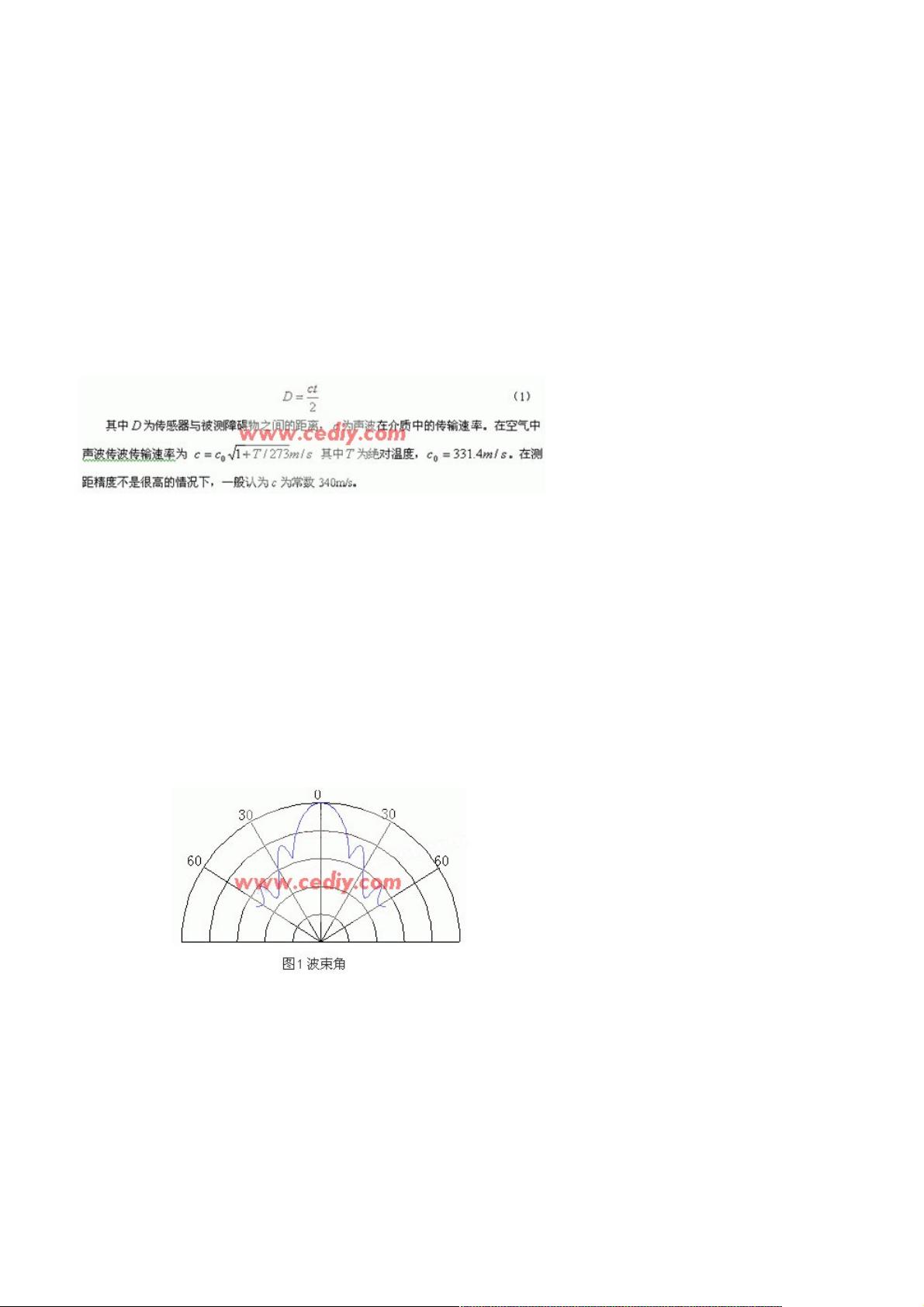
1. Polaroid600系列传感器:这是一种集成发射和接收功能的传感器。它内部结构包含一个塑料薄片,涂有金属薄膜,形成一个电容器。当施加特定的方波电压时,薄片振动产生超声波。接收端设有调谐电路,只允许频率接近49.4kHz的回波信号通过,过滤掉其他频率的干扰。传感器发射的超声波波束角为30度,这影响了探测范围和精确度。
2. Polaroid6500超声波距离模块:负责管理和处理超声波发射和接收的操作,确保数据的准确传输。它与600系列传感器配合工作,优化了系统的性能。
3. ATMEL AT89C51单片机:作为微控制器,负责整个系统的控制逻辑,包括超声波信号的发送、接收、计时以及数据处理,最终将测距结果转化为可读的信号。
设计中还需考虑传感器的延迟时间和余振效应,即发射超声波后的短暂停顿期间和传感器在发射后仍存在的振动状态,这些都会影响测距的实时性和精度。通过精细的电路设计和软件算法优化,可以减小这些影响,提升系统的整体性能。
基于超声波传感器的测距系统设计是一个结合硬件选型、电路设计和信号处理的复杂过程,对于实现移动机器人安全避障至关重要。通过这样的系统,机器人能够实时感知周围环境,做出反应,保障自身的安全运行。
基于超声波传感器的测距系统设计基于超声波传感器的测距系统设计
安全避障是移动机器人研究的一个基本问题。障碍物与机器人之间距离的获得是研究安全避障的前提,超声波传感器以其信息处理简单、价格低廉、
硬件容易实现等优点,被广泛用作测距传感器。本超声波测距系统选用了SensComp公司生产的Polaroid 6500系列超声波距离模块和600系列传感器,微
处理器采用了ATMEL公司的AT89C51。本文对此超声波测距系统进行了详细的分析与介绍。
1、 超声波传感器及其测距原理
超声波是指频率高于20KHz的机械波[1]。为了以超声波作为检测手段,必须产生超生波和接收超声波。完成这种功能的装置就是超声波传感器,习惯
上称为超声波换能器或超声波探头。超声波传感器有发送器和接收器,但一个超声波传感器也可具有发送和接收声波的双重作用。超声波传感器是利用压
电效应[1]的原理将电能和超声波相互转化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。
超声波测距的原理一般采用渡越时间法TOF(time of flight)[2]。首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到
二倍的声源与障碍物之间的距离,即
1、 硬件电路设计
我们设计的超声波测距系统由Polaroid 600系列传感器、Polaroid 6500系列超声波距离模块和AT89C51单片机构成。
2.1 Polaroid 600系列传感器
此超声波传感器是集发送与接收一体的一种传感器。传感器里面有一个圆形的薄片,薄片的材料是塑料,在其正面涂了一层金属薄膜,在其背面有一
个铝制的后板。薄片和后板构成了一个电容器,当给薄片加上频率为49.4kHz、电压为300VAC pk-pk的方波电压时,薄片以同样的频率震动,从而产生频
率为49.4kHz的超声波。当接收回波时,Polaroid 6500内有一个调谐电路,使得只有频率接近49.4kHz的信号才能被接收,而其它频率的信号则被过滤。
Polaroid 600超声传感器发送的超声波具有角度为30度的波束角[3],如图1所示:
超声波传感器既可以作为发射器又可以作为接收器,传感器用一段时间发射一串超声波束,只有待发送结束后才能启动接收,设发送波束的时间为D,
则在D时间内从物体反射回的信号就无法捕捉;另外,超声波传感器有一定的惯性,发送结束后还留有一定的余振,这种余振经换能器同样产生电压信号,
扰乱了系统捕捉返回信号的工作。因此,在余振未消失以前,还不能启动系统进行回波接收,以上两个原因造成了超声传感器具有测量一定的测量范围。
此超声波最近可以测量37cm。
2.2 Polaroid 6500系列超声波距离模块
Polaroid 6500系列超声波距离模块的硬件电路如图2所示:
下载后可阅读完整内容,剩余3页未读,立即下载
2019-09-21 上传
2020-12-13 上传
2020-12-13 上传
点击了解资源详情
点击了解资源详情
2023-06-24 上传
2019-09-14 上传
2019-04-25 上传
2019-01-18 上传

weixin_38604620
- 粉丝: 4
- 资源: 895
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
