冲击下柔性机械臂动力学建模研究:考虑耦合效应
下载需积分: 9 | PDF格式 | 290KB |
更新于2024-08-23
| 119 浏览量 | 举报
"考虑变形耦合的受冲击柔性机械臂动力学建模 (2005年)"
这篇论文探讨了在受冲击情况下柔性机械臂的动力学建模,特别关注了变形耦合的影响。柔性机械臂在现代工业自动化和机器人技术中扮演着重要角色,由于其结构的复杂性和动态特性,对其进行精确的动力学建模是一项挑战。作者赵春燕和卢健康采用了刚-柔耦合体动力学的新理论,以更准确地描述机械臂的行为。
首先,他们将柔性机械臂简化为一根弹性梁,这是一个常见的工程简化方法,便于分析。在这一简化模型中,他们不仅考虑了梁的弯曲(flexural)变形,还纳入了纵向(extensional)变形,并且重要的是,他们考虑了变形之间的耦合效应。这种耦合效应在大范围运动中尤为显著,因为它会影响到机械臂的动力学性能和稳定性。
为了建立动力学方程,论文运用了Lagrange方程,这是一种在经典力学中广泛使用的工具,用于描述系统的动力学行为。Lagrange方程能够处理非保守力,如冲击力,这对于研究受到碰撞的机械臂尤其适用。在冲击发生后,机械臂的瞬态响应被用作求解动力学方程组的初始条件,这有助于理解冲击对系统动态性能的影响。
论文通过数值仿真对比了刚体模型和考虑了变形耦合的柔性模型。结果表明,柔性耦合模型能更好地反映实际情况,因为它能够捕捉到由耦合效应引起的更复杂的动力学行为。这对于柔性机械臂的动力学分析和控制至关重要,因为更精确的模型能够为控制器设计提供更可靠的依据,从而提高系统的性能和安全性。
这篇2005年的论文为理解和模拟受冲击的柔性机械臂提供了一种新的、更精确的方法,强调了变形耦合在动力学分析中的重要性。这一研究对于提升机器人技术在碰撞环境下的性能和可靠性具有重要意义,对于后续的机器人控制策略和系统设计提供了理论基础。
第
24
卷第
8
期
组
)()5
年
8
月
机械科学与技术
MECHANICAL
SCIENCE
AND
TECHNOLOGY
Vo
l.24 No.8
August
2
∞
5
文章编号:
1
∞
3-8728(2
∞
5)
08
-09
32
-04
考虑变形藕合的受冲击柔性机械臂动力学建模
赵春燕,卢健康
(西北工业大学,西安
71
∞
72)
赵春燕
摘
要:将刚·柔稿合体动力学的新建模理论应用于受冲击柔性机械臂的研究。将柔性机械臂简化为弹性梁,在梁
的纵向变形中考虑、了变形稿合量,计及了这种精合对大范围运动的影响。利用Lagran
ge
方程建立了机械臂的动力
学方程。将受碰撞冲击后柔性机械臂的瞬态响应,作为求解动力学方程组的初始条件。针对刚体模型和柔性搞合
模型进行了数值仿真计算,表明柔性搞合模型更加符合实际情况,为柔性机械臂的动力学分析与控制提供了依据。
关键词:柔性机械臂;搞合量;雄撞
中固分类号:咀U1
3.1
;0313.7
文献标识码
:A
Modeling
oC
Im
pact
on
a
F1
exible
Robot
Ann
Considering
Coupled
E
tT
ect
in
DeConnation
ZHAO Chun-yan
,
LU
Jian-kang
(Northwestern Polytechnical University
,
Xi'an
710072)
Abstract:
In this paper, the new methodology of rigid-flexible coupling dynamic model is used to derive
the dynamics formulation of a flexible robot arm
, which is simplified
to
a flexible beam and shocked
by
an
impact loading.
Not
only the flexural and extensional effects, but also the coupling terms
of
出
ese
deforma-
tions
缸
e
included in the
derivation.
旬,
the coupling effects between large overall motions and elastic de-
formation of the flexible beam are
considered.
咀
le
difference equations are obtained by using
Lagr
ange' s
e
伊
ation
,
and the initial conditions are determined
by
the impacted loading.
Th
e simulation results of rig-
id model and rigid-flexible coupling model
show
出刨出
e
rigid-flexible coupling model is valid for the actu-
al
flexible
缸
m.
Key
words:
Flexible robot arm; Coupling term; Impact
随着空间技术和机器人技术的不断发展,柔性机械臂由
于其轻质、低耗能以及高速运动,在工程实际中获得了广泛
的应用。通常执行机构位于柔性机械臂的终端杆件上,在工
作中(如工业机蜿手抓取物体、空间机械手拦截空间碎片)
由于终端杆件刚度较小,机械臂受到载荷冲击作用易引发柔
性效应,对其操纵精度有较大的影响。对这类机械臂的动力
学建模以及控制系统设计,大多可将其简化为
E
uI
er-Ber
noulli
或
Timω.henko
梁,组成带有柔性附件的中心刚体模型,
归结为单连杆或双连杆机械臂的设计问题
[1-4)
。对这类具
有大范围运动的弹性结构研究,经历了不计大范围运动和变
形运动捐合作用的运动·弹性动力学方法(阻
D)JS)
以及目前
广泛使用的棍合坐标法
[6
,
7)
。这种模型是柔性多体系统动
力学的一种零次近似辅合模型
"-9]
,没有考虑弹性部件的纵
横向变形之间的相互藕合作用,以及这种糯合作用对大范围
运动的影响。在实际应用中,传统零次近似方法可能会导致
错误的结论
[10)
。因而变形藕合对刚·柔棍合体动力学行为
的影响,逐渐受到研究者的关注
[11-16)
。
本文针对单连杆柔性机械臂,将其简化为具有中心刚
收稿日期:2(则
4-06
-23
作者筒介:赵春燕
(1965-)
,女(汉)
,陕西,副研究员,硕士研究生
体、柔性梁以及末端集中质量的旋转结构,在梁的纵向变形
中考虑了横向变形造成的影响,利用有限元技术和La
grange
方程推号出了旋转柔性梁的一次近似数学模型,对
受碰撞冲击后机械臂的动力学响应特性进行了分析研究。
(j)
U
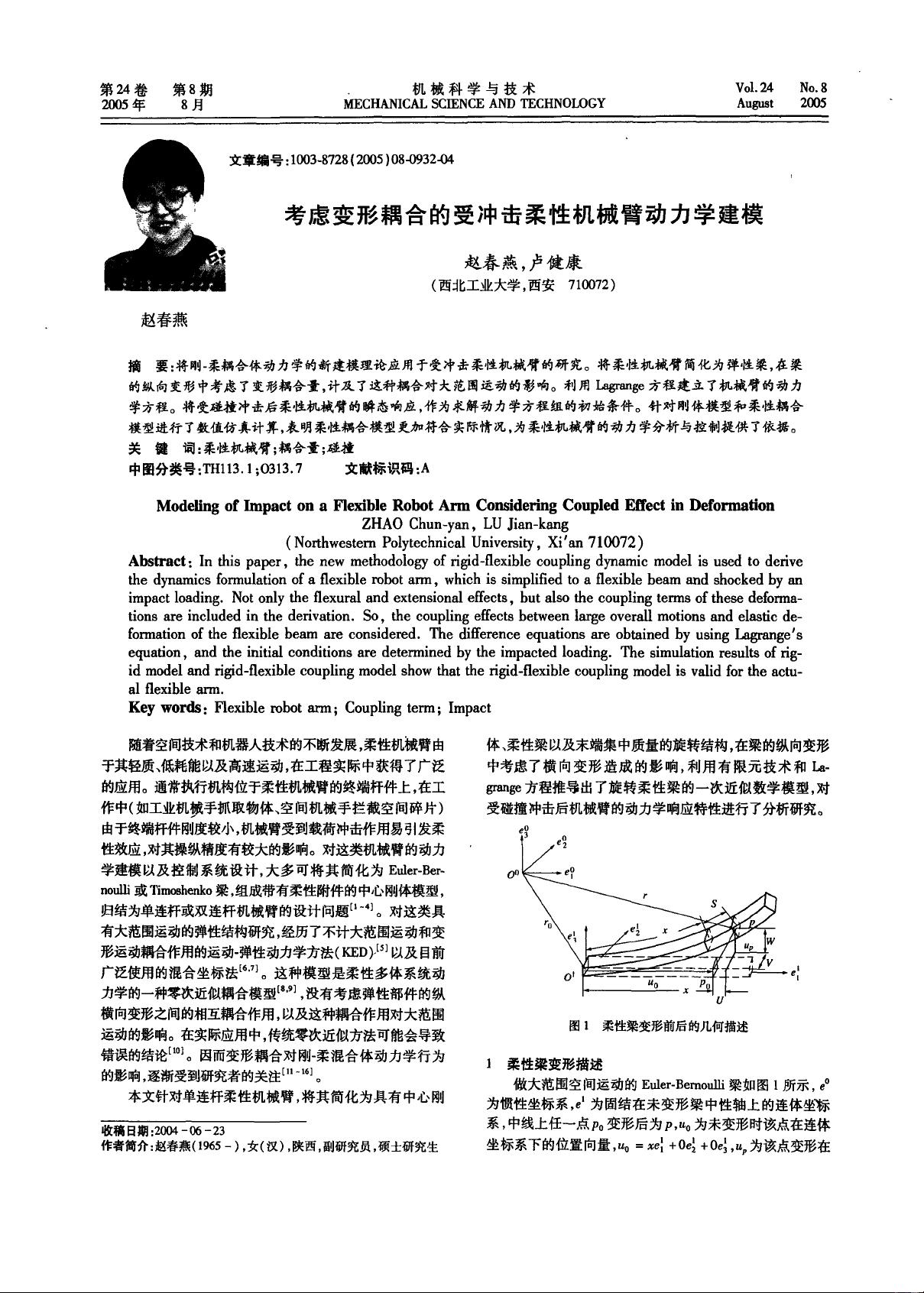
图
1
柔性梁变形前后的几何描述
1
嚣性梁变形描述
做大范围空间运动的
E
uI
er-
Bemoulli
梁如图
1
所示,
e
O
为惯性坐标系
,
e
l
为固结在未变形梁中性轴上的连体坐哧
系,中线上任一点
PO
变形后为
p
,
U
O
为未变形时该点在连体
坐标系下的位置向量,
uo=zei+04+04
,
up
为该点变形在
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐



weixin_38735899
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全面详实的大学生电工实习报告汇总
- 利用极光推送实现App间的消息传递
- 基于JavaScript的节点天气网站开发教程
- 三星贴片机1+1SMT制程方案详细介绍
- PCA与SVM结合的机器学习分类方法
- 钱能版C++课后习题完整答案解析
- 拼音检索ListView:实现快速拼音排序功能
- 手机mp3音量提升神器:mp3Trim使用指南
- 《自动控制原理第二版》习题答案解析
- 广西移动数据库脚本文件详解
- 谭浩强C语言与C++教材PDF版下载
- 汽车电器及电子技术实验操作手册下载
- 2008通信定额概预算教程:快速入门指南
- 流行的表情打分评论特效:实现QQ风格互动
- 使用Winform实现GDI+图像处理与鼠标交互
- Python环境配置教程:安装Tkinter和TTk
