卡尔曼滤波算法入门与精通:状态方程与应用详解
版权申诉
175 浏览量
更新于2024-06-13
收藏 13.06MB PDF 举报
卡尔曼滤波算法是一种在统计信号处理领域广泛应用的递推算法,主要用于估计动态系统的状态,特别是在存在噪声的情况下。该算法最初由Rudolf E. Kalman于1960年提出,已被广泛用于航空航天、机器人导航、控制系统设计等众多领域。
**入门部分**
1. **引言**:卡尔曼滤波的核心概念是结合了预测和更新两个步骤,通过已有的系统模型(如线性和非线性)和观测数据,对系统的状态进行连续的估计。对于线性系统,状态方程通常表示为 \( y = Ax + Bu + w \),其中 \( y \) 是观测值,\( A \) 和 \( B \) 分别是状态转移矩阵和控制输入矩阵,\( u \) 是控制输入,而 \( w \) 是系统噪声。
2. **适用系统**:线性系统(如位置跟踪、姿态估计)因其易于处理和计算而被首选,但卡尔曼滤波也可扩展到非线性系统,如通过EKF(Extended Kalman Filter)进行近似处理。
**进阶部分**
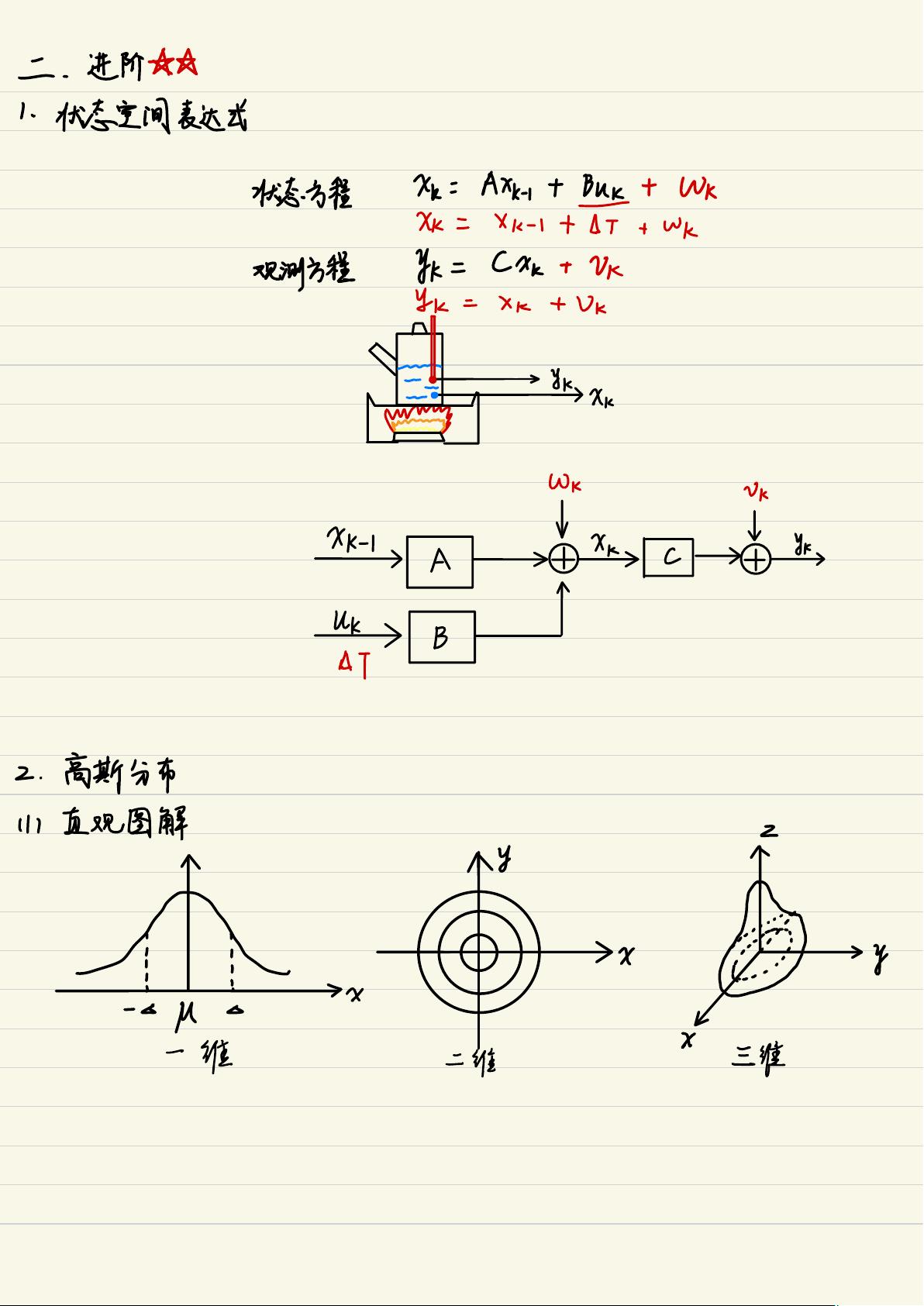
3. **状态空间表达式**:卡尔曼滤波的核心是状态空间模型,包括状态方程 \( x_{k+1} = Fx_k + Gu_k + w_k \) 和观测方程 \( z_k = Hx_k + v_k \),其中 \( F \) 是状态转移矩阵,\( G \) 是控制矩阵,\( H \) 是观测矩阵,\( w_k \) 和 \( v_k \) 分别是状态和观测噪声。
4. **高斯分布**:卡尔曼滤波基于高斯分布假设,认为噪声是零均值的正态分布,这使得计算简化,特别是协方差矩阵的处理。
5. **超参数**:主要包括过程噪声协方差矩阵 \( Q \) 和观测噪声协方差矩阵 \( R \),它们反映了系统噪声的特性,需要根据具体应用调整以达到最佳性能。
6. **卡尔曼直观图解**:通过图形方式展示了滤波过程,包括预测和更新阶段,帮助理解算法的工作原理。
7. **参数分析**:卡尔曼滤波性能受初始条件、噪声模型以及超参数选择的影响,对这些参数的理解和优化至关重要。
8. **机器人体验**:举例说明卡尔曼滤波在机器人领域的实际应用,如GPS定位、速度和位置估计,以加深理解。
**精通阶段**
1. **卡尔曼滤波公式回顾**:详细解释预测步(预测误差协方差)、更新步(卡尔曼增益矩阵)和最终状态估计的公式。
2. **深度学习应用**:随着深度学习的发展,卡尔曼滤波和其他传统滤波方法常与之结合,例如深度学习辅助的卡尔曼滤波,以提高复杂环境下的估计精度。
总结起来,卡尔曼滤波算法是一种强大的工具,通过其数学严谨性和鲁棒性,在不断调整和优化超参数后,能够有效地处理动态系统中的不确定性,尤其在需要实时、精确状态估计的场景下表现出色。学习和掌握卡尔曼滤波算法不仅有助于解决实际问题,也对理解更高级的控制和信号处理理论有重要意义。
⼆
进
阶
㚫
⼈
状态
空间
表达式
状态
⽅程
鬏
然
中
器
㔈
些
观测
⽅程
我
⼆
Cxktvkyk-XktUKL-x.CO
k
型
四
_
itt
☆
同业
z.
⾼
斯
分布
111
直观
图解
⼋
※
擜
虑
⼀维
⼆维
X
三维
剩余17页未读,继续阅读
2021-10-15 上传
2015-04-30 上传
2013-06-29 上传
2022-03-14 上传
点击了解资源详情
点击了解资源详情

朝游碧海暮苍梧
- 粉丝: 3026
- 资源: 160
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
