
基于六元空间阵列的声源定位系统实现基于六元空间阵列的声源定位系统实现
声源定位技术是语音识别技术的基础,针对复杂噪声和混响的室内环境造成声源定位精度不理想的问题,提出
了一种基于麦克风阵列的声源定位系统。首先阐述了声源定位原理,然后提出了改进的广义互相关算法。该算
法利用两信号之间的相关性,估计出麦克风之间的时延,进而得到声程差,并根据几何关系确定声源在空间中
的位置,最后在嵌入式平台上进行实验。实验结果证明,该方法能较准确地得到声源位置,且距离和方位角的
误差分别不超过+5°和±15 cm。
0 引言引言
听觉是人感知外界环境,并与外界环境进行交互的重要方式,根据不同物体发出的声音,人们可以判断出声源的方位。而
在某些特定场合,就需要机器来准确定位出声源的位置
[1]
。因此,基于麦克风阵列的声源定位技术得到了广泛的关注和快速的
发展,对其开展研究具有很强的实践价值
[2]
。
目前,常用的基于麦克风阵列的声源定位方法有3种:基于最大输出功率的可控波束形成定位方法
[3]
、基于高分辨率谱估计
技术的定位方法
[4]
和基于时延估计的定位方法
[5]
。其中,基于时延估计的定位方法由于运算量小、实时性好、易于实现等优点
而成为最普遍的使用方法
[6]
。其方法首先估计了声源到达各个麦克风的时延,再根据几何关系得到声源的位置。文献[7]提出了
一种改进时延估计的声源定位方法。该方法首先设计了四元十字型麦克风阵列,然后在广义互相关的基础上引入二次相关算法
来削弱环境噪声产生的干扰,同时采用自适应滤波算法来提高环境混响的时延精度,从而获得更准确的声源位置。但缺少界面
的直观显示。文献[8]首先提出了GCC-IMLPT算法,并通过仿真验证了该算法的性能,且选取了计算量小、实时性较好的球形
插值法来得到声源位置,然后研究了麦克风拓扑结构,确定麦克风阵列的大小,最后在实际环境中测试了系统的性能,但由于
系统是在计算机上实现的,不方便携带。当前,优化算法提高定位精度,实现界面的直观显示,以及方便携带成为考虑的热点
问题。
本文提出一种基于麦克风阵列的声源定位系统。采用改进的广义互相关算法获取时延,进而得到声程差,并根据几何关系
确定声源在空间中的位置,最后在嵌入式平台上进行实验。实验结果证明,该方法能较准确地得到声源位置。
1 声源定位系统原理声源定位系统原理
1.1 声源定位原理声源定位原理
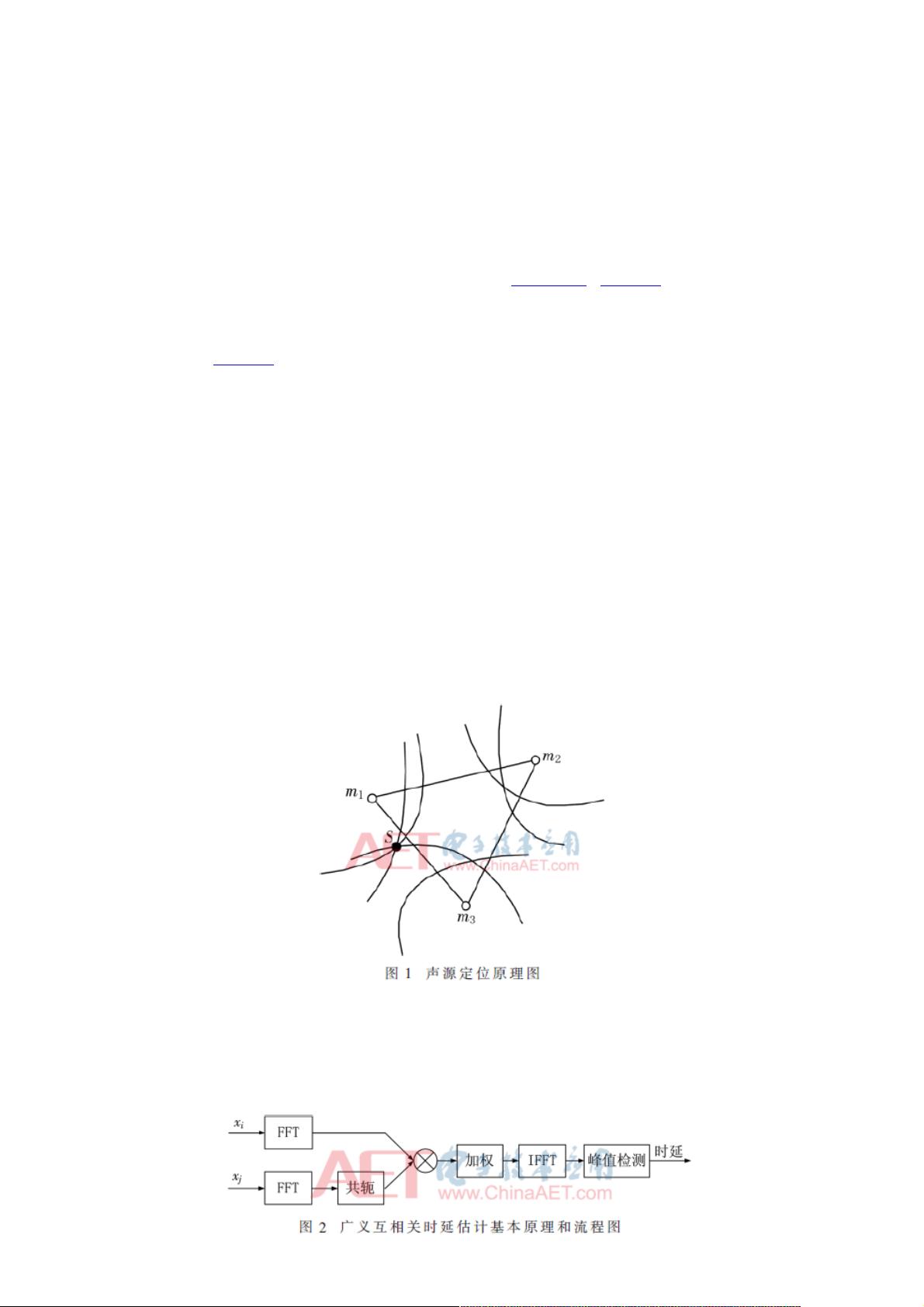
由于同一个声源传播到位置不同的各个麦克风时会产生时间差,这个时间差称为时延。时延与声速相乘即可得到声程差。
由双曲线的性质可知,双曲线上任意一点到两个焦点的距离之差的绝对值为双曲线的实轴长。因此,声源在以任意两个麦克风
为焦点,声程差为实轴长的多条双曲线的焦点上
[9]
。声源定位原理图如图1所示,S为声源。
1.2 改进的广义互相关算法改进的广义互相关算法
广义互相关算法是目前最常用的一种时延估计方法。广义互相关算法是通过将两路声音信号从时域变化为频域,并求得两
信号之间的互功率谱,再进行加权,这样可以降低噪声和反射带来的误差,然后经过反傅里叶变换,将频域转换回时域得到互
相关函数并计算峰值,峰值所对应的位置即时延
[10]
。广义互相关时延估计基本原理和流程图如图2所示。

weixin_38614484
- 粉丝: 0
- 资源: 875
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- zigbee-cluster-library-specification
- JSBSim Reference Manual
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论1