
科技信息
引言
自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、
冶金、交通、宇航、国防等领域。近年来机器人的智能化水平不断提高,
它大大提高了劳动效率,减轻了人的劳动强度,提高了产品质量,改善了
劳动环境,减少了能源和材料消耗,保证了安全等。
智能小车,即轮式机器人,是移动机器人的一种,其内容涵盖机械、
汽车、电子、自动控制、计算机、传感技术等多个学科的知识领域,作为
一门新兴的综合技术,可广泛的应用于工厂自动料车
、固定场地搬运车
等技术领域,也可应用于复杂、恶劣的工作环境,具有良好的民用和军
用应用前景。
1.智能车硬件设计方案
图 1 智能车控制系统结构图
智能车控制系统如上图 1 所示,CMOS 摄像头采集路面的灰度图
像传给单片机,单片机通过对图像的处理识别路径,并实时地通过测速
模块检测小车速度,利用 PID 算法实现对小车的转向及速度的闭环控
制。
该系统采用飞思卡尔公司高性能 16 位单片机 MC9S12DG128 为核
心控制器,该单片机可以升级到 50MHz,能够达到通常只有 32 位控制
器才能达到的性能水平,完全可以满足图像采集处理、电机、舵机实时
控制的要求。
视觉模块采用 CMOS 摄像头,CMOS 摄像头是一种高集成度大规
模集成电路,使用光敏元件为感光器件,经光电转换直接产生电压信
号,具有很高的灵敏度,功耗相对于 CCD 有很大的降低。因为模拟环境
是白色地面上铺黑色的引导线,所以我们只需要采集灰度信号就可以
了,即 YUV 颜色空间里的 Y 信号,信号处理量不大,基本可以满足实时
采集
、处理的要求。图 2 为编码芯片 OV7620 与 16 位单片机的电路图:
图 2 OV7620 与 MC9S12DG128 连接图
方向控制模块采用舵机,其内部集成了对其转角的控制电路,可以
将单片机输出的某一路 PWM 信号输入到其控制线中,即可对舵机转角
进行控制。
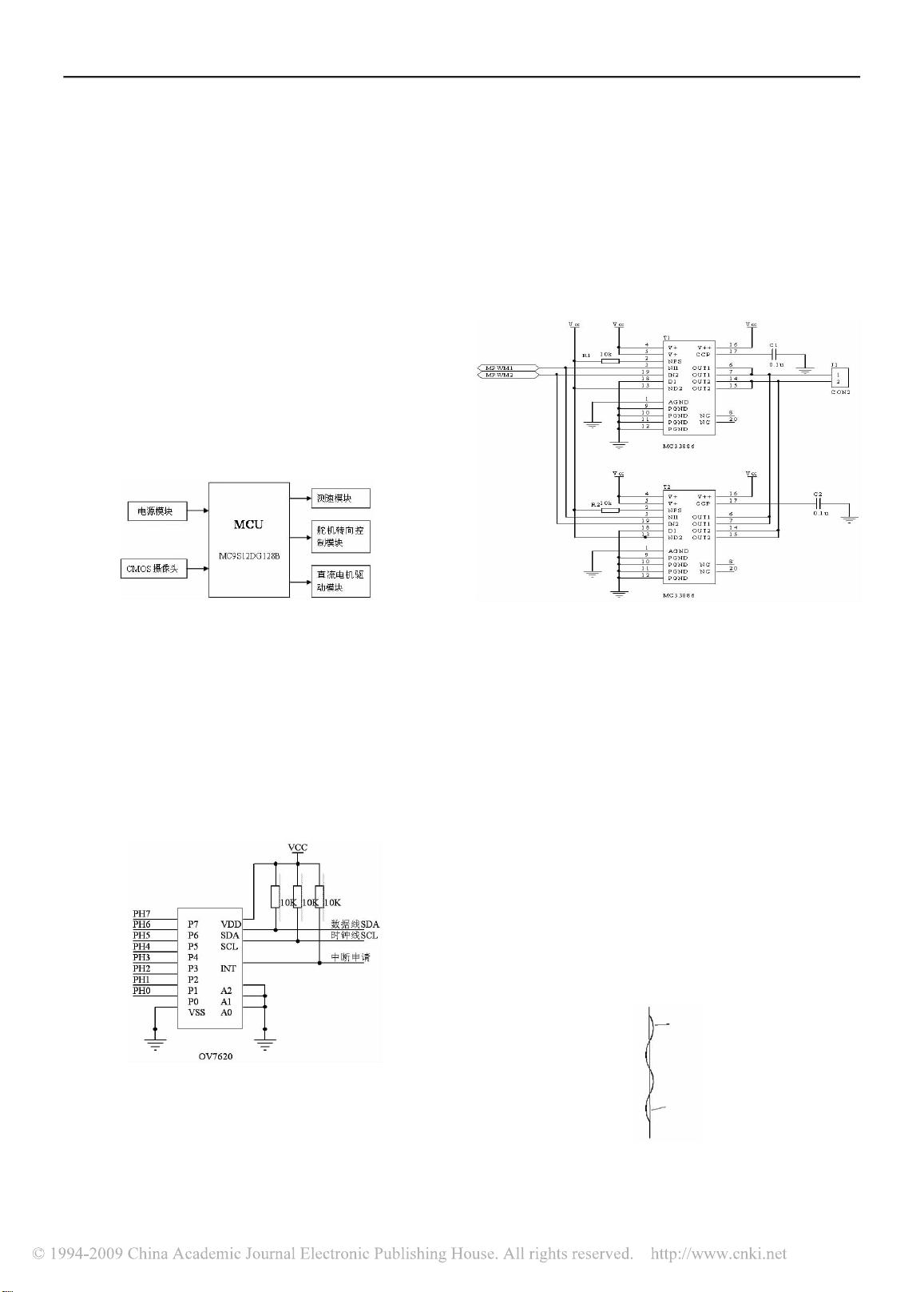
动力模块采用直流电机,直流电机的驱动采用集成芯片 MC33886,
作为一个单片电路 H- 桥,MC33886 是理想的功率分流直流马达和双
向推力电磁铁控制器,能够控制连续感应直流负载达到 5.0 安培,输出
负载脉宽调制(PWM- ed)的频率可达 10KHZ。 为了增大输出电流,本文
把 MC33886 的多个输出端并联在一起,提升了加减速性能。在驱动电
路中加入反向制动电路来控制电机,可以极大地提高减速性能。下图为
两块 MC33886 并联电路图。
图 3 两块 MC33886 并联电路原理图
为了对车速进行闭环控制,该系统增加了车速检测模块,本设计中
采用的是 OMRON 公司生产的 E6A2- CS100 型光电编码器。速度传感
器通过后轮轴上的齿轮与电机相连,那么轮子的转动速度跟传感器的
速度成正比,这样就实现了速度的检测。
2.软件程序设计
2.1 路径识别
摄像头输出的是数字信号,先要用 DG128 的 IIC 模块对 OV7620
内部寄存器配置。然后分别将视频同步信号(奇偶场同步信号、行同步
信号、位同步信号)输入单片机。再采用单片机内部定时计数器进行分
频采样,采用间隔点取样的方式,以减轻 CPU 的负担。并在采样同时进
行简单的图像处理:
●跑道识别,对采集到的图像色点的灰度进行“二值化处理”,针对
环境亮度进行相应阀值的设置;
●将路面映射回来的图像中的一些干扰信号(如路面上的一些黑
点及非跑道信号)通过“边缘算法”将其去滤除;
●进行图像还原处理,对映射图像进行梯形的恢复。
当一行图像采集完毕后,立即根据灰度差和道路的连续性进行道
路识别。这样,在整帧图像采集完毕后,道路识别同时完成,大大节省了
计算时间,加快了系统响应。
由于摄像头安装位置较低,单片机得到的图像信息产生了较大的
畸变,因而在做出控制决策前,需对识别到的道路进行“梯形矫正”。但
在实际操作中,并不需要矫正识别到的整条道路,只需对影响控制决策
的那些点进行矫正即可。
2.2 转向非线性 P 控制
图 4 S 道
方向控制主要是控制舵的转向,最简单的方法就是使赛车基本沿
着导引线走(“完全跟踪”)。理论上这样就能较好的按比赛规则完成全
程。实际上这种完全跟踪的跑法只能在较小的速度花较长的时间来跑。
为考虑时间的最优化,将路径和转向大小要协调好,
最佳行驶路线
导引线方向
智能小车路径识别及速度控制系统的实现
韩山师范学院物理与电子工程系 董晓庆 谢森林 李 平
[摘 要]本文介绍了智能小车路径识别及速度控制系统具体实现方法。在该系统中,由 CMOS 摄像头实现路径识别,直流电机作为
驱动,舵机控制方向,旋转编码器检测速度,利用非线性 PID 算法实现小车的路径跟踪、速度的闭环控制,使小车能按照给定的引导
线平稳、快速地行驶。实验证明:系统能很好地满足智能车对路径识别性能和抗干扰能力的要求,舵机调节响应时间快,稳态误差小,
具有较好的动态性能和良好的鲁棒性。
[关键词]智能小车 路径识别跟踪 CMOS 摄像头 非线性 PID 算法
(下转第 72 页)
高校理科研究
71
— —















