

An efficient orientation filter for inertial and
inertial/magnetic sensor arrays
Sebastian O.H. Madgwick
April 30, 2010
Abstract
This report presents a novel orientation filter applicable to IMUs consisting of
tri-axis gyroscopes and accelerometers, and MARG sensor arrays that also include
tri-axis magnetometers. The MARG implementation incorporates magnetic distortion
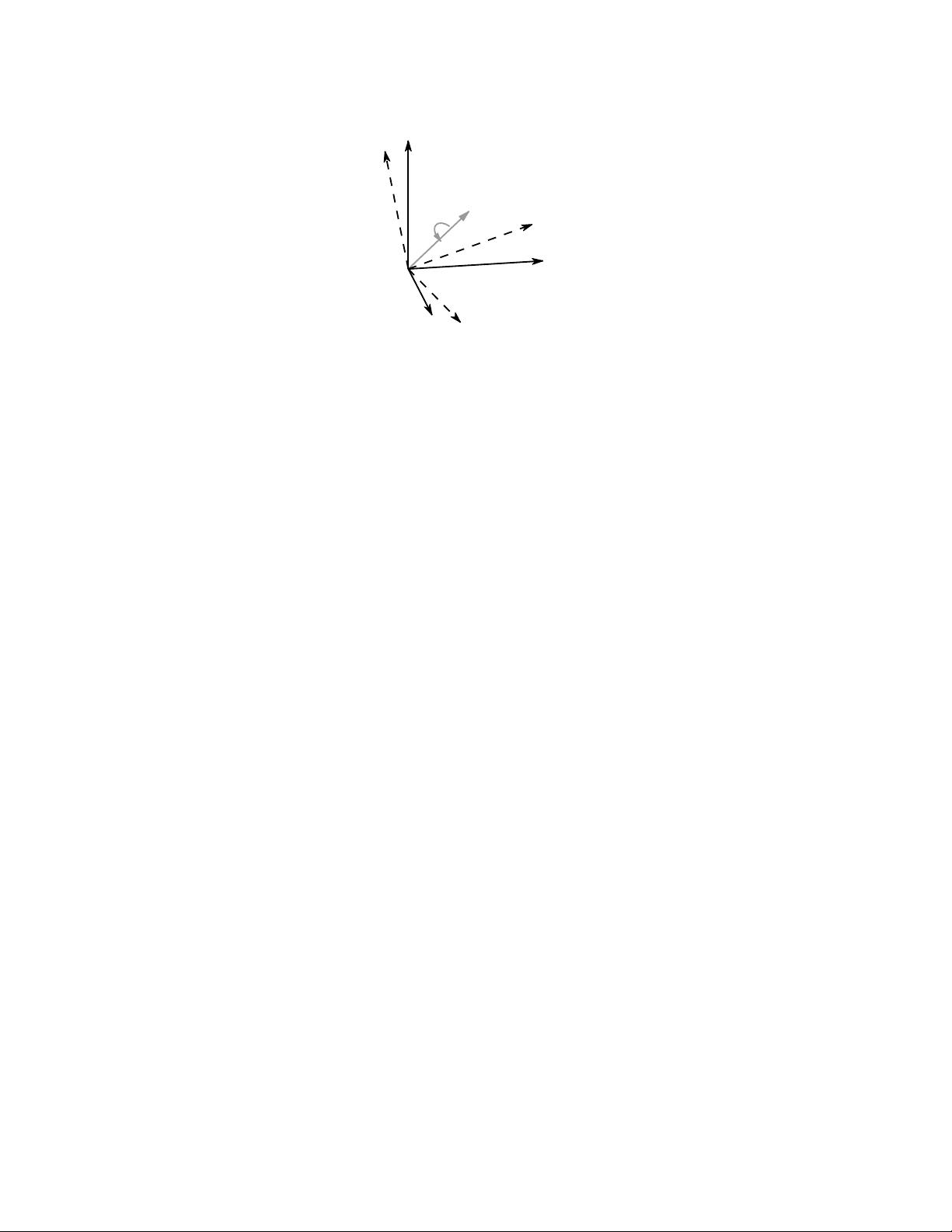
and gyroscope bias drift compensation. The filter uses a quaternion representation,
allowing accelerometer and magnetometer data to be used in an analytically derived
and optimised gradient-descent algorithm to compute the direction of the gyroscope
measurement error as a quaternion derivative. The benefits of the filter include: (1)
computationally inexpensive; requiring 109 (IMU) or 277 (MARG) scalar arithmetic
operations each filter update, (2) effective at low sampling rates; e.g. 10 Hz, and (3)
contains 1 (IMU) or 2 (MARG) adjustable parameters defined by observable system
characteristics. Performance was evaluated empirically using a commercially available
orientation sensor and reference measurements of orientation obtained using an optical
measurement system. A simple calibration method is presented for the use of the
optical measurement equipment in this application. Performance was also benchmarked
against the propriety Kalman-based algorithm of orientation sensor. Results indicate
the filter achieves levels of accuracy exceeding that of the Kalman-based algorithm;
< 0.6
◦
static RMS error, < 0.8
◦
dynamic RMS error. The implications of the low
computational load and ability to operate at low sampling rates open new opportunities
for the use of IMU and MARG sensor arrays in real-time applications of limited power
or processing resources or applications that demand extremely high sampling rates.
1



剩余31页未读,继续阅读


joey_wu
- 粉丝: 7
- 资源: 3
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- RTL8188FU-Linux-v5.7.4.2-36687.20200602.tar(20765).gz
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
- SPC统计方法基础知识.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论20