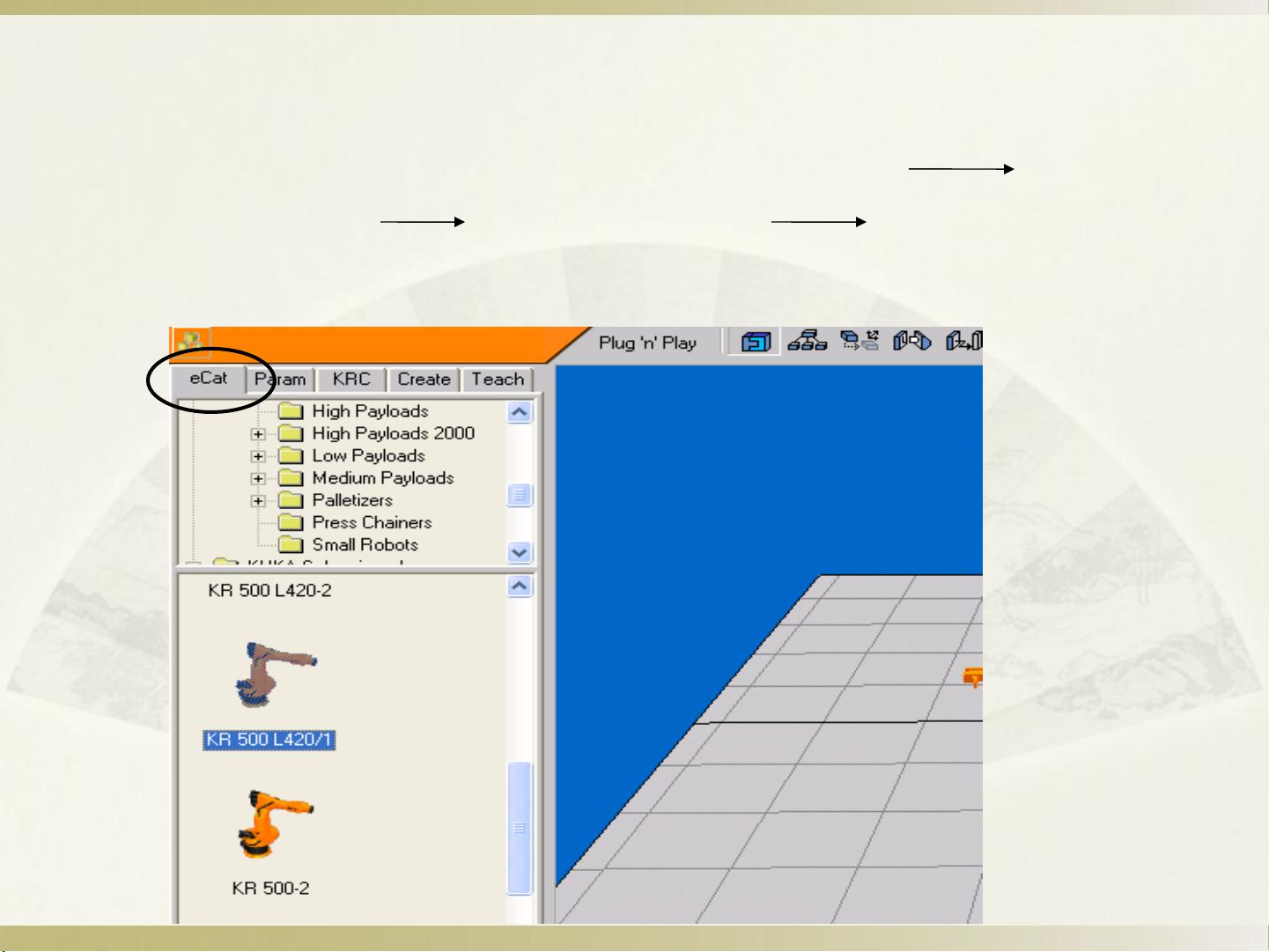
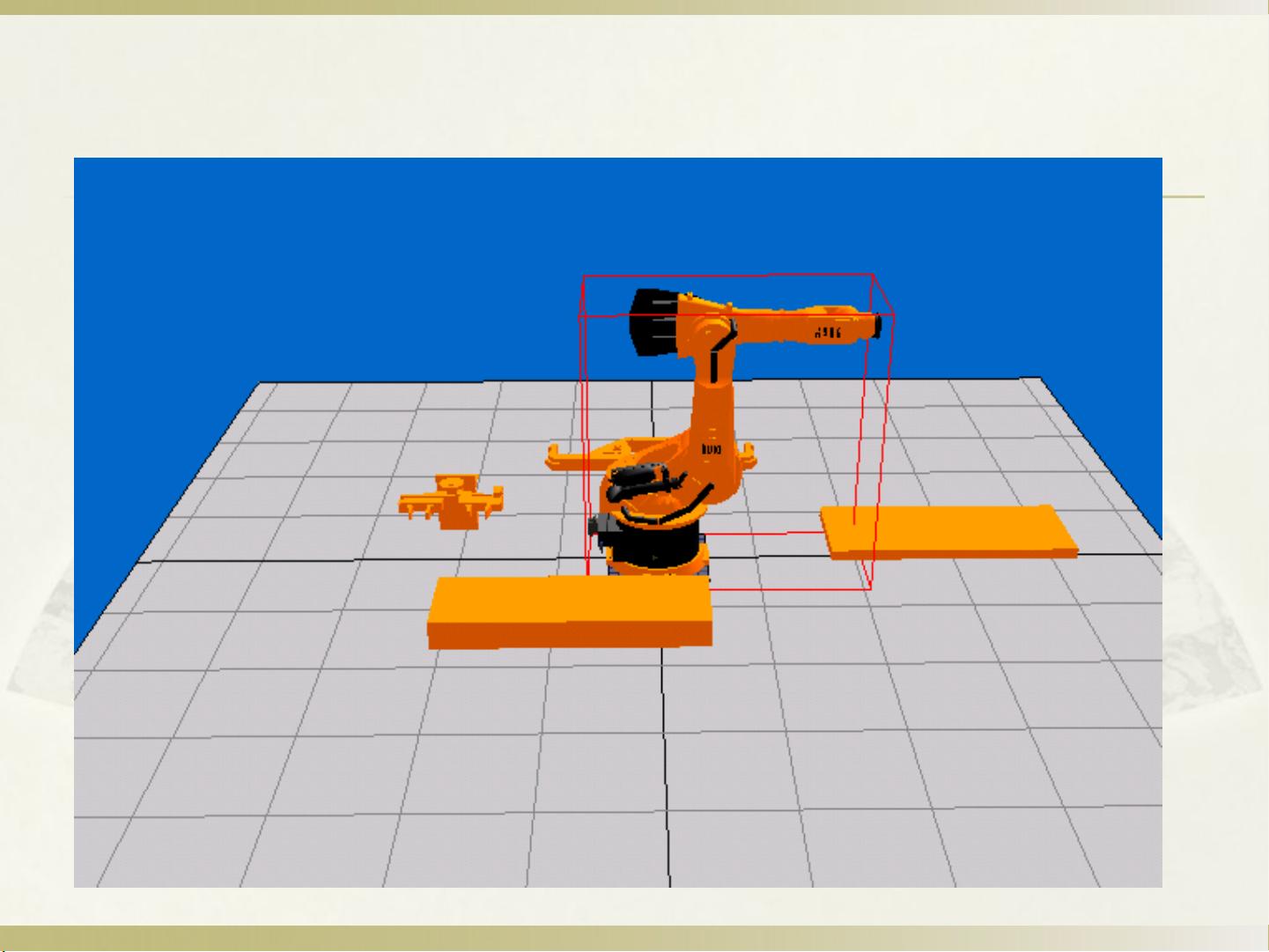
"本教程是关于KUKA SIM PRO仿真的详细介绍,旨在帮助学习者熟悉KUKA仿真软件,掌握其基本操作,并通过实例演示如何建立简易的砂芯搬运系统。教程内容涵盖软件的认识、基本操作以及具体的工作流程,如导入工件、选择机器人、安装夹具、设置传送带、规划机器人路径以及执行砂芯抓取任务等。" 在KUKA SIM PRO仿真教程中,首先介绍了KUKA仿真软件的基础知识,包括软件界面、功能和在工业自动化中的应用。学习者需要了解KUKA仿真软件的主要作用,即模拟真实世界的机器人工作环境,以便在实际操作前进行测试和优化。 接着,教程深入到软件的基本操作环节,例如如何导入工件。这包括通过“File”菜单选择“Import”,然后根据指定的文件类型选取所需的模型。在导入工件后,学习者需要了解如何在场景中定位和放置这些工件。 教程进一步展示了如何选择并添加KUKA机器人,例如选择“KR500L420/1”型号的重型负载机器人。学习者需要知道如何在“eCate”选项卡下的相应文件夹中找到并引入机器人模型。同时,教程还指导了如何将夹具安装到法兰盘上,这涉及到使用“Trans”按钮和“PnP”功能精确对齐和固定夹具。 教程的另一个重点是创建和配置传送带,这里选择了“ConveyorsRotatorL”模型,并通过“Para”选项卡设置传送带的长度和宽度。学习者需掌握如何调整参数以适应不同工作需求。 在构建好工作环境后,教程进入了机器人路径规划阶段。通过“Teach”选项卡,学习者学习如何设置和记录机器人的工作点,以及如何使用特定图标来移动机器人。 最后,教程详细演示了如何让机器人执行砂芯搬运任务。这包括让机器人移动到正确位置,创建新的工具,通过“Translate”调整坐标,使用“PnP”功能实现对砂芯的精确抓取和放置。这一部分涉及到机器人运动控制和对象交互的高级操作。 通过这个KUKA SIM PRO仿真教程,学习者不仅可以掌握KUKA仿真软件的基本操作,还能了解到如何设计和实施一个完整的机器人工作流程,这对于理解工业自动化和机器人技术具有重要的实践意义。
剩余49页未读,继续阅读