
Qground Control
Connect pix-hawk to computer.
Plug in radio receiver (locaon of port is at the top of the pix-hawk).
A radio transmier is needed.
Download and install qground control. hp://qgroundcontrol.com/downloads/
A$er installaon, run qground control whiles pix-hawk is connected. Wait for qground control to
detect pix-hawk and wait for all parameters to be downloaded else disconnect pix-hawk and
connect to computer again.
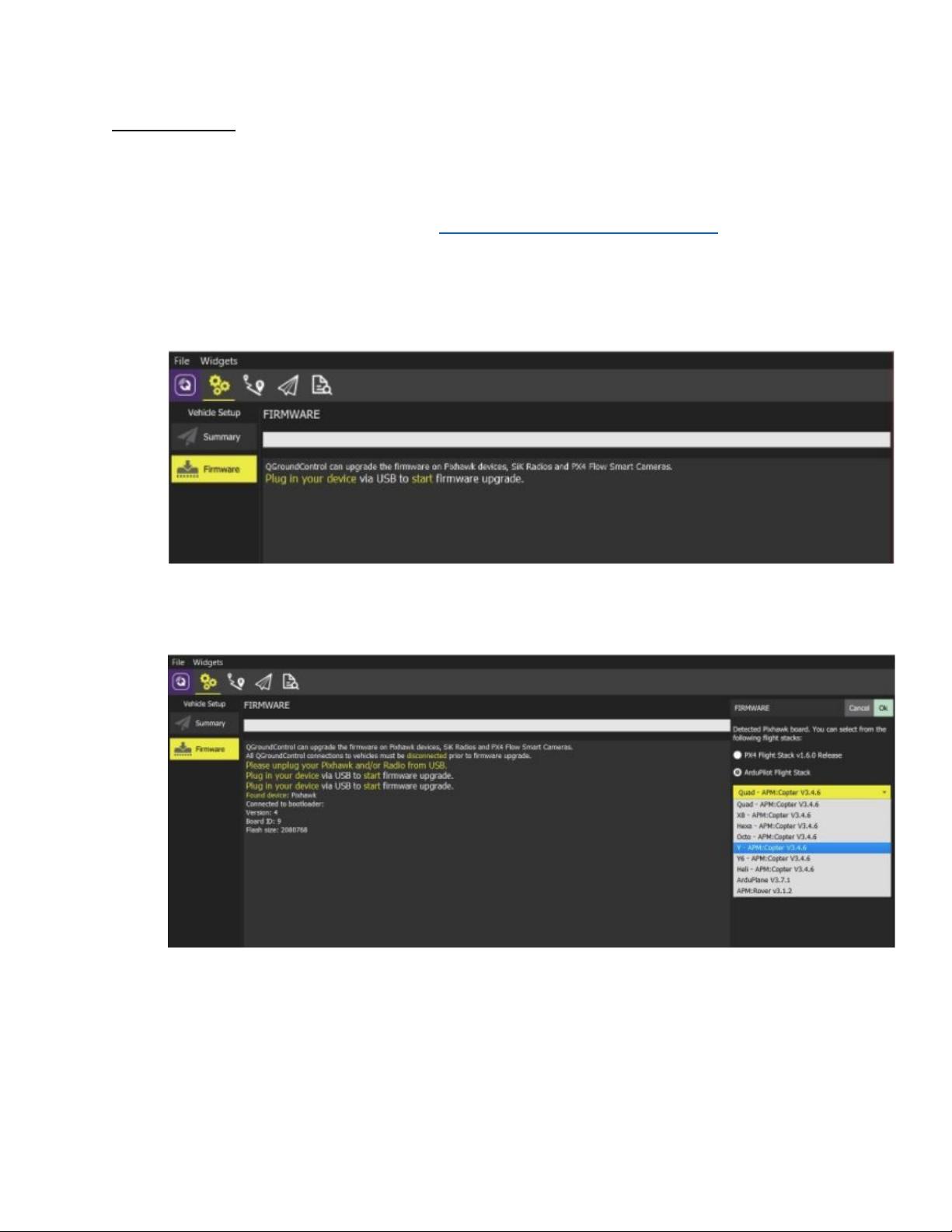
Now check if the drone is running the correct version of the px4 *rmware version. (click on
se+ngs, then *rmware).
For a Pix-hawk compable board choose either PX4 Pro or ArduPilot *rmware to download the
current stable release. For ArduPilot the speci*c *rmware has to be selected for each type of
vehicle. (Recommend selecng PX4)
Check the advance se+ngs and select stable version (recommended) and click on ok for
*rmware upgrade to start.















