
Lex Fridman
lex.mit.edu
January
2018
MIT 6.S094: Deep Learning for Self-Driving Cars
https://selfdrivingcars.mit.edu
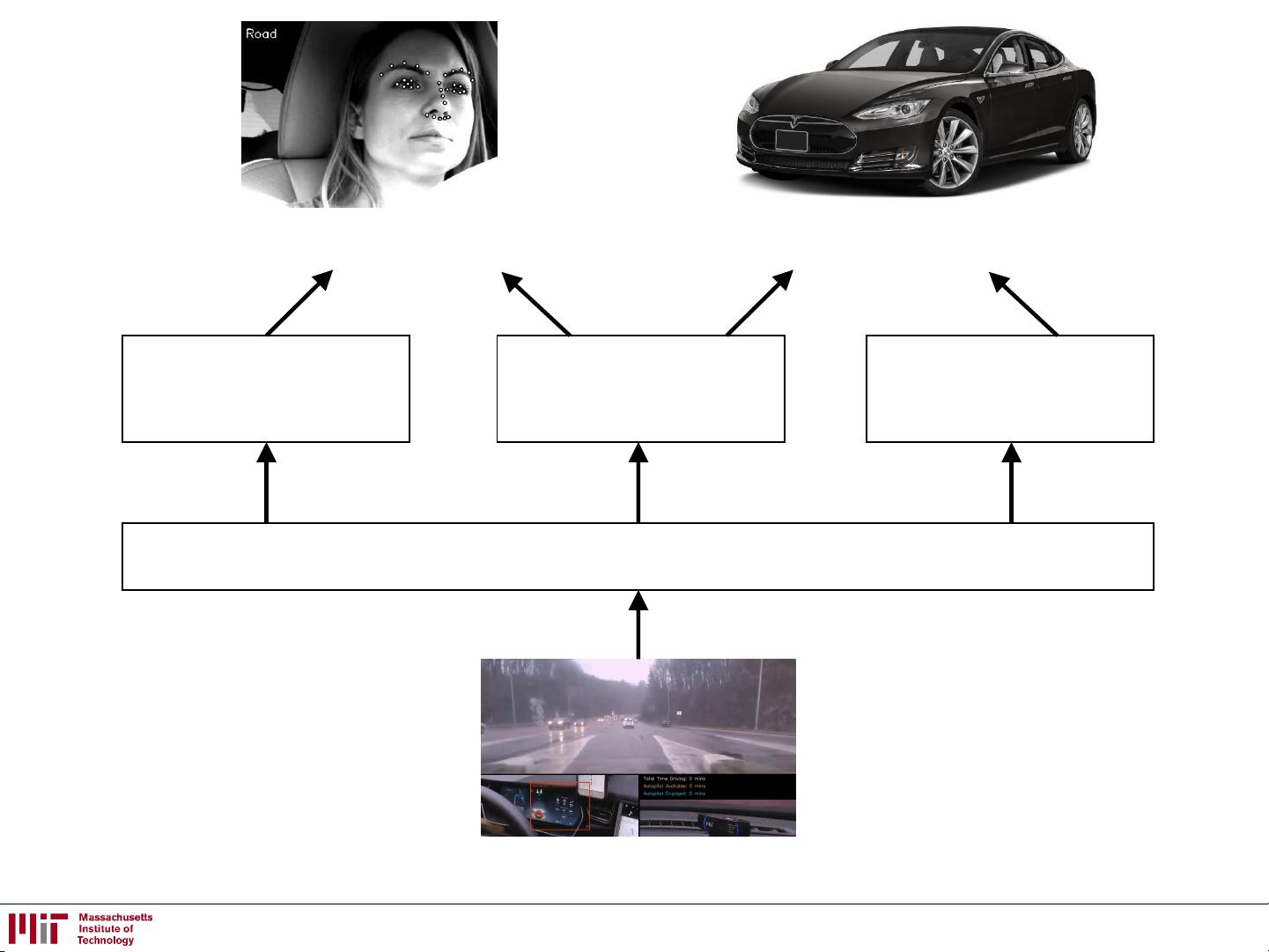
Human Behavior Shared Autonomy
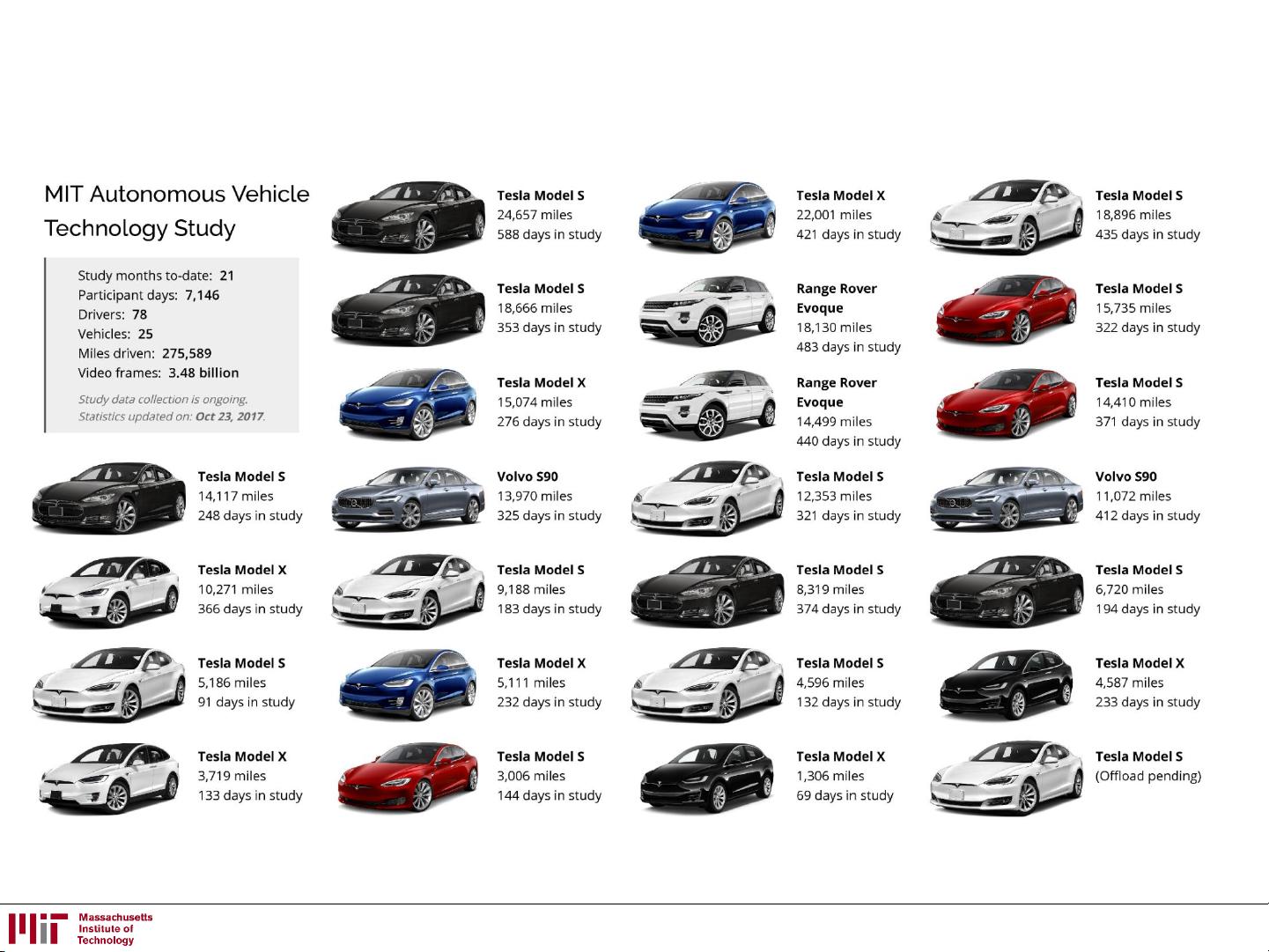
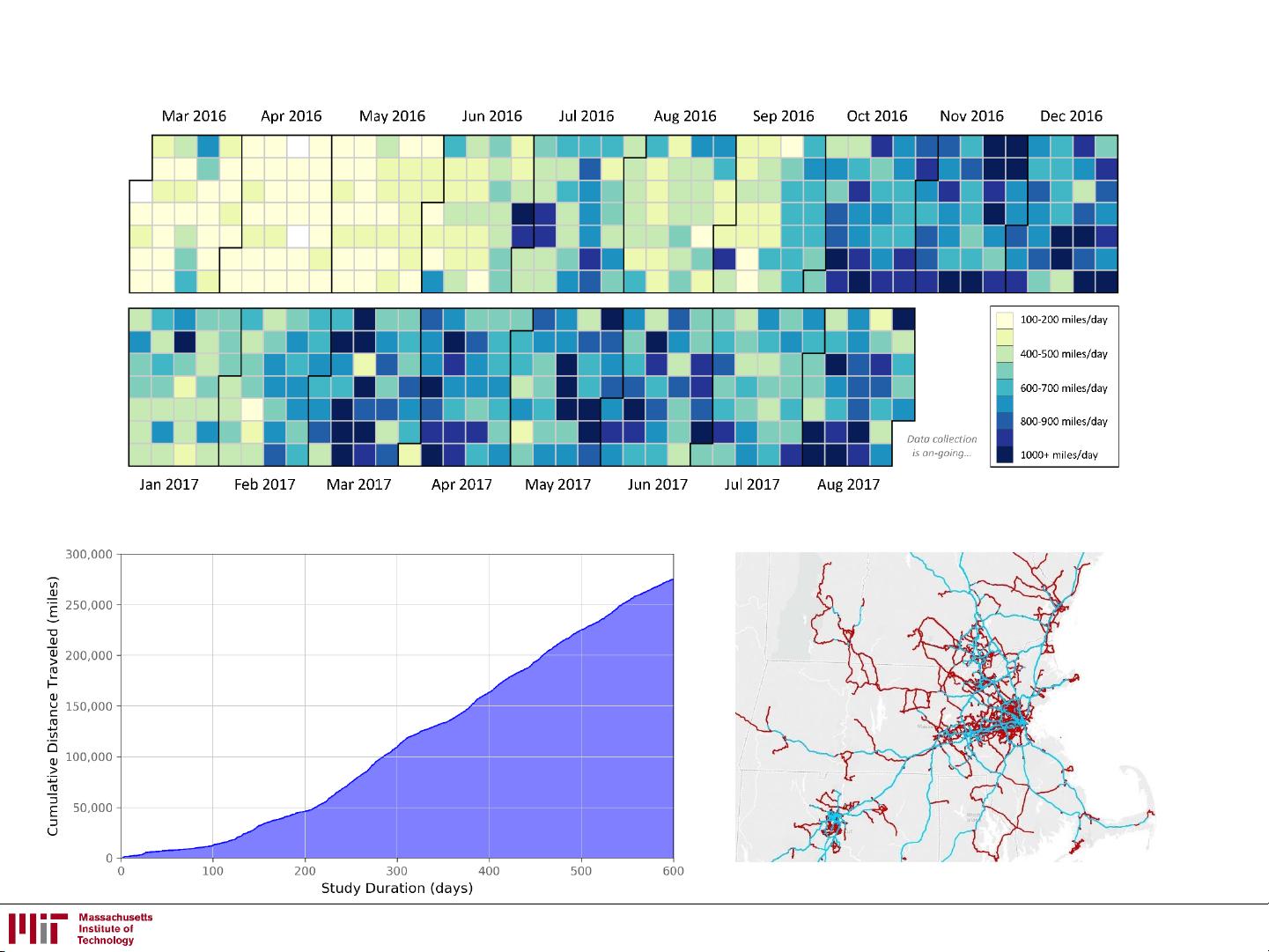
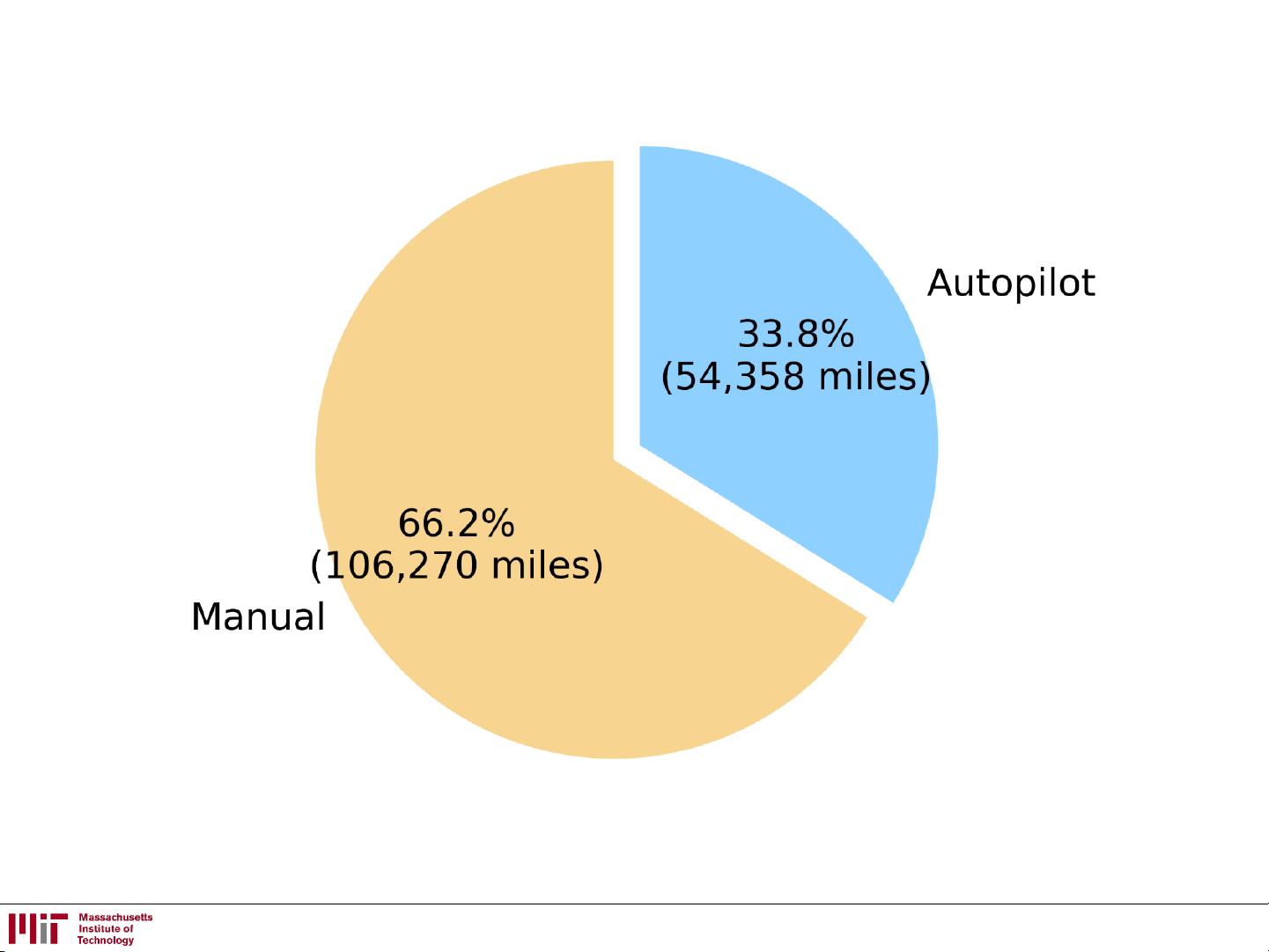
Large-Scale Naturalistic Data
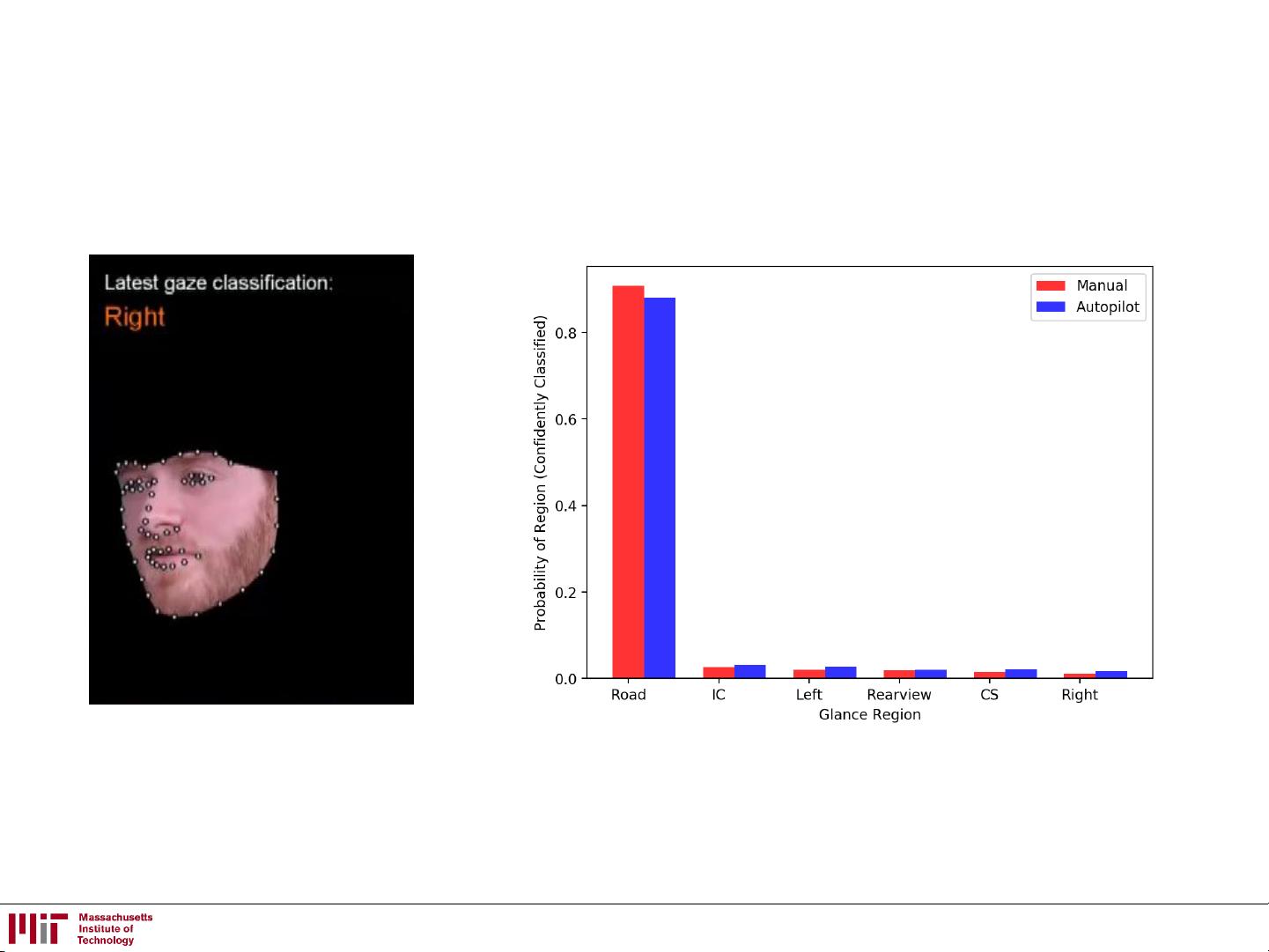
Understand
Behavior
Assist
Behavior
Share
Control
Semi-Supervised Learning
5rjs.cn 专注无人驾驶
剩余97页未读,继续阅读















