计算机工程与应用
www.ceaj.org
2017,53(23)
泊车辅助系统主要分为两大类:一类是基于传感
器,另一类是基于视觉。目前使用比较广泛的是基于视
觉的泊车辅助系统,而 360°全景视觉泊车辅助系统是目
前最先进的辅助系统。全景视觉泊车辅助系统从根本
上消除了车辆周围的视觉盲点,帮助驾驶员更为直观地
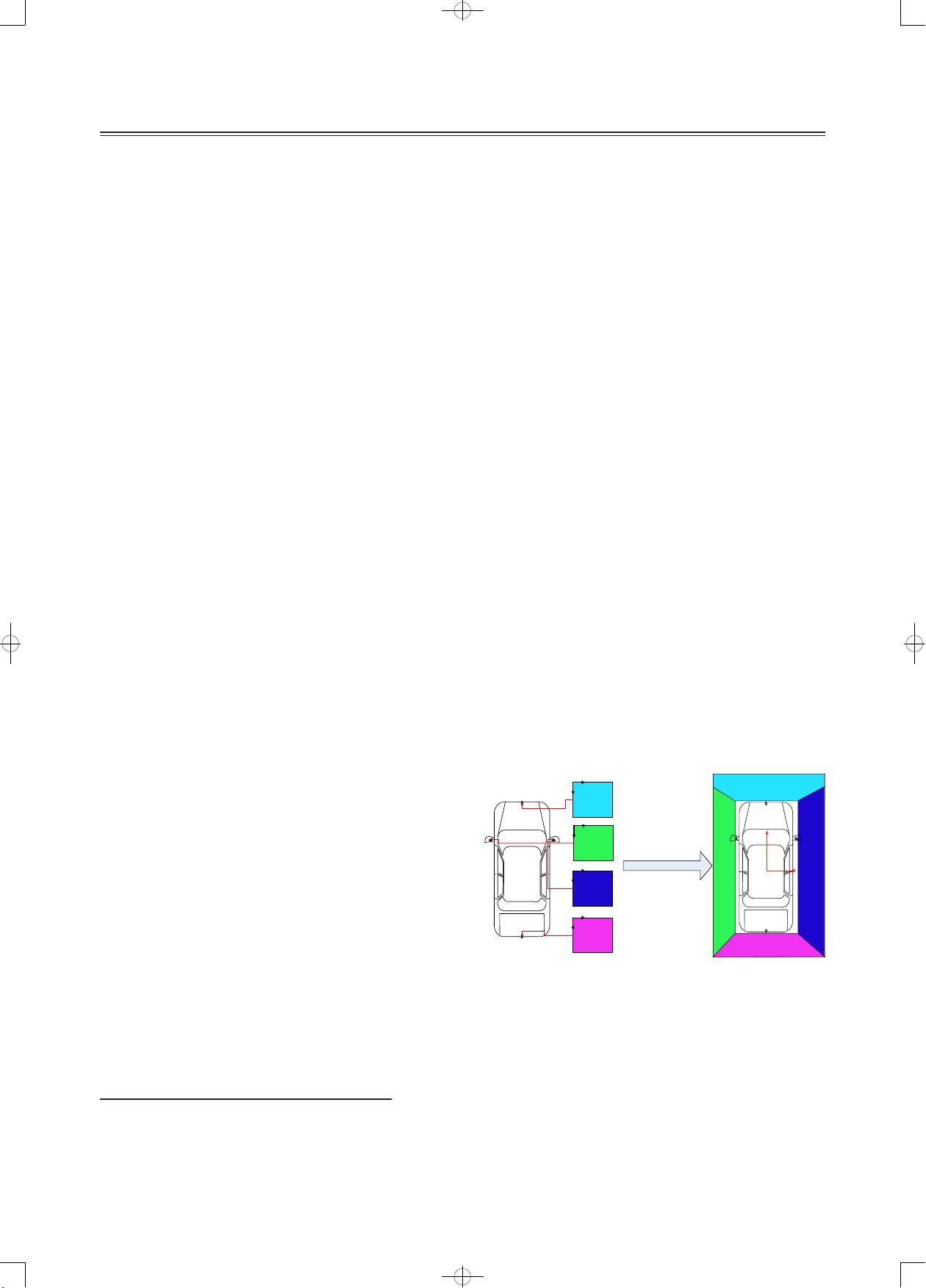
停泊汽车。本系统的原理为:通过在车身前、后、左、右
安装四个广角摄像头,由于相机成像过程中存在非线性
畸变
[1-2]
,因此需要进行畸变矫正
[3-5]
,对畸变矫正后的图
像进行标定得到投影矩阵,转换图像视角为俯视图,最
后利用逆向投影算法合成一幅 360°全景图像。
逆向投影算法是全景泊车系统的核心,通过逆向投
影合成一幅无缝的、高清晰的图像。目前大多算法是基
于图像拼接技术
[6-12]
,这种算法的计算过程过于复杂,拼
接过程也十分困难,远没有逆向投影简单有效。其原理
如图 1所示。
1 系统方案与指标
系统主要由三部分组成:4 个水平视角为 175°的鱼
眼摄像头,一块图像采集卡,一个 7 英寸的 TF T 显示屏
幕。系统信息处理流程如图 2所示。
基于逆向投影的全景泊车系统设计与实现
赵三峰,谢 明,陈玉明
ZHAO Sanfeng, XIE Min g, CHEN Yumi ng
南京工业大学 电气工程与控制科学学院,南京 211816
College of Electrical Engineerin g and Cont rol Science, Nanjing Technology University, Na njing 211816, China
ZHAO Sanfeng, XIE Ming, CHEN Yuming. Design and impl ementation of around view parking system based on
reverse projection algorithm. Computer Engineering and Applications, 2017, 53(23):267-270.
Ab stract:The around view parking syste m us es 4 wide angle cameras in stalled in the car’s front, back, left and right to
collect the images in real time, which are transmitted to the image processing equipment for correction, p rojection trans-
formation and image compositi on on the screen to form a 360 degree panoramic view. The system uses processor
HI3520D and video decoder NVP1918C as t he core of hardware, and uses the fish-eye correct ion algorithm, project ion
transformation and reverse projection algorithm as the software core. The experi mental results sho w that the around view
par king system can achieve seamless and clear images in real-t ime display.
Key w ord s:aro und vie w p arking; HI3520D; NVP1918C; reverse project ion
摘 要:全景泊车系统利用安装在车身前后左右的 4 个广角摄像头实时采集周围的图像,并传送给图像处理设备进
行校正、俯视变换和图像合成,最后在显示屏上形成一幅 360°的全景俯视图。系统以处理器 HI3520D和视频解码器
NVP1918C 为硬件核心,以鱼眼校正、投影变换和逆向投影算法为软件核心,最终实现实时显示无缝和清晰画面的
360°全景泊车影像系统。
关键词:全景泊车;HI3520D;NVP1918C;逆向投影
文献标志码:A 中图分类号:TP39 1.4 doi:10.3778/j.issn.1002-8 331.1605-0373
基金项目:2015 年江苏省六大人才高峰项目(No.XXRJ-012)。
作者简介:赵三峰,男,硕士,研究方向:机器视觉;谢明,男,博士生导师,研究方向:机器视觉;陈玉明,男,讲师,研究方向:机器视觉。
收稿日期:2016-05-26 修回日期:2016-11-10 文章编号:1002-8331(2017)23-02 67-04
CN KI网络优先出版:2016-11-21, http://www.cnki.net/kc ms/detail/11.2127.TP.20161121.2040.054.html
Ima ge1
Ima ge2
Ima ge3
Ima ge4
u1
v1
v2
u2
v3
u3
u4
v4
æ
è
ç
ç
ç
ç
ö
ø
÷
÷
÷
÷
kx
j
ky
j
k
= M
i
∗
æ
è
ç
ç
ç
ç
ö
ø
÷
÷
÷
÷
u
ij
v
ij
1
y
x
i = 1,2,3,4
j
为图像中点的个数
Camera1
Camera4
Camera4
Camera1
Camera2
Camera2
Camera3
Camera3
图 1 全景泊车系统基本原理
Computer Engineeri ng and Ap plications计算机工程与应用
267

qq_35660586
- 粉丝: 1
- 资源: 1
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- RTL8188FU-Linux-v5.7.4.2-36687.20200602.tar(20765).gz
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
- SPC统计方法基础知识.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论9